Support-Limited Generalized Uncertainty Relations on Fractional Fourier Transform ()
1. Introduction
In information processing, the uncertainty principle plays an important role in elementary fields, and data concentration is often considered carefully via the uncertainty principle [1] - [8] . In continuous signals, the supports are assumed to be infinite, based on which various uncertainty relations [1] [2] [9] - [21] [22] have been presented. However, in practice, both the supports of time and frequency are often limited for N-point discrete signals. In such case, the infinite support fails to hold true. In limited supports, some papers such as [23] - [26] have discussed the uncertainty principle in conventional time-frequency domains for continuous and discrete cases and some conclusions are achieved that can be taken as our special cases in the following sections. However, none of them has covered the FRFT in terms of Heisenberg uncertainty principles that have been widely used in various fields [4] - [6] . Therefore, there has a great need to discuss the uncertainty relations in FRFT domains. As the rotation of the traditional FT [27] , FRFT [5] [6] [28] - [30] has some special properties with its transform parameter and sometimes yields the better results such as the detection of LFM signal [31] . Readers can see more details on FRFT in [6] and [32] and so on.
In this paper, we extend the Heisenberg uncertainty principle in FRFT domain for both discrete and continuous cases for the ε-concentrated signals or the signals with finite supports. It is shown that these bounds are connected with lengths of the supports and FRFT parameters. In a word, there have been no reported papers covering these results and conclusions, and most of them are new or novel.
2. Preliminaries
2.1. Definition of DFRFT
Here, we first briefly review the definition of FRFT. For given continuous signal 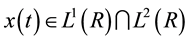 and
and , its FRFT [6] is defined as
, its FRFT [6] is defined as
 (1)
(1)
where  and
and  is the complex unit,
is the complex unit,  is the transform parameter defined as that in [6] . In addition,
is the transform parameter defined as that in [6] . In addition,
 . If
. If ,
,  , i.e., the inverse FRFT
, i.e., the inverse FRFT .
.
However, unlike the discrete FT, there are a few definitions for the DFRFT [32] , but not only one. In this paper, we will employ the definition defined as follows [6] [32] :
 (2)
(2)
Clearly, if , (2) reduces to the traditional discrete FT [6] [32] . Also, we can rewrite definition (2) as
, (2) reduces to the traditional discrete FT [6] [32] . Also, we can rewrite definition (2) as
 ,
,
where ,
, .
.
For DFRFT, we have the following property [5] [6] [32] :
 .
.
More details on DFRFT can be found in [6] and [32] .
2.2. Frequency-Limiting Operators
Definition 1: Let ![]() be a complex-valued signal with
be a complex-valued signal with ![]() and its FRFT
and its FRFT![]() , if there is a function
, if there is a function ![]() vanishing outside
vanishing outside ![]() (
(![]() is a measurable set) such that
is a measurable set) such that ![]() (
(![]()
is a small value with![]() ), then
), then ![]() is
is ![]() -concentrated.
-concentrated.
Specially, if![]() , then definition 1 reduces to the case in time domain [23] [24] . If
, then definition 1 reduces to the case in time domain [23] [24] . If![]() , then definition 1 reduces to the case in traditional frequency domain [23] [24] . The
, then definition 1 reduces to the case in traditional frequency domain [23] [24] . The ![]() can be calculated after the
can be calculated after the ![]() is
is
fixed because ![]() and
and![]() . Therefore,
. Therefore, ![]()
Definition 2: Generalized frequency-limiting operator ![]() is defined as
is defined as
![]() (3)
(3)
If![]() , then definition 2 is the time-limiting operator [23] [24] . If
, then definition 2 is the time-limiting operator [23] [24] . If![]() , then definition 2 is the traditional frequency-limiting operator [23] [24] . Definitions 1 and 2 disclose the relation between
, then definition 2 is the traditional frequency-limiting operator [23] [24] . Definitions 1 and 2 disclose the relation between ![]() and
and![]() . For the discrete case, we have the following definitions.
. For the discrete case, we have the following definitions.
Definition 3: Let ![]() (
(![]() with) be a discrete sequence with
with) be a discrete sequence with ![]() and its DFRFT
and its DFRFT![]() , if there is a sequence
, if there is a sequence ![]() satisfying
satisfying ![]()
![]() such that
such that ![]() (
(![]() is a small value with
is a small value with![]() ), then
), then ![]() is
is ![]() -concentrated.
-concentrated.
Here, ![]() is the 0-norm operator that counts the non-zero elements.
is the 0-norm operator that counts the non-zero elements.
Definition 4: Generalized discrete frequency-limiting operator ![]() is defined as
is defined as
![]() with
with ![]() is the DFRFT of
is the DFRFT of ![]() and
and ![]() is the character function
is the character function
on![]() .
.
Clearly, definitions 3 and 4 are the discrete extensions of definitions 1 and 2. They have the similar physical meaning. These definitions are introduced for the first time, the traditional cases [23] [24] are only their special cases. Definition 3 and 4 disclose the relation between ![]() and
and![]() .
.
2.3. The Continuous Heisenberg Uncertainty Principles
As shown in introduction, the existed continuous generalized uncertainty relations [9] - [21] are mainly for the infinite supports. Here, we discuss the case of finite support. First we introduce the following lemma.
Lemma 1: ![]() , where
, where ![]() denotes the Frobenius norm operator.
denotes the Frobenius norm operator.
Proof: From the definition of the operator ![]() in definition 2, we have
in definition 2, we have
![]()
Exchange the locations of the integral operators, we obtain
![]() ,
,
so that
![]() .
.
Set![]() , we have
, we have
![]() .
.
Now, we know that [see the proof of (3.1) in 25]
![]() .
.
Let![]() , then
, then
![]()
where ![]() is the character function of the set
is the character function of the set![]() . Therefore, via Parseval’s theorem [6] and the definition of
. Therefore, via Parseval’s theorem [6] and the definition of
FRFT in (1) we have
![]()
Hence, we obtain the final result
![]()
Now we give the first theorem.
Theorem 1: Let ![]()
![]() be a measurable set and suppose
be a measurable set and suppose ![]()
![]() is the FRFT of
is the FRFT of ![]() for transform parameter
for transform parameter ![]()
![]() , such that
, such that ![]()
![]() is
is ![]()
![]() ?concentrated on
?concentrated on ![]()
![]() . Then
. Then
![]() . (4)
. (4)
Proof: Since![]() , therefore we can find such
, therefore we can find such ![]() that makes
that makes![]() .
.
Meanwhile, via triangle inequality and the definitions of concentration we have
![]()
At the same time, we know![]() ,
,
so that
![]() ,
,
i.e.,![]() .
.
Therefore,![]() .
.
From [24] [27] , we know that![]() .
.
Use the above two results, we obtain
![]() ,
,
i.e.,![]() .
.
Hence,![]() . The special case
. The special case ![]() is trivial. Here, we find that when
is trivial. Here, we find that when![]() , (4) reduce to the traditional case in Theorem 2 [(3.1), 25].
, (4) reduce to the traditional case in Theorem 2 [(3.1), 25].
Obviously, this bound is different from that [20] of infinite case. In [20] , the main involved objects are the variances of the signal in infinite supports. Here the measurable sets (![]() ,
,![]() ) are involved, which is instructive
) are involved, which is instructive
for the discrete case in the next section. If![]() , what will happen? Clearly, it is impossible. From the conclusion [33] , if
, what will happen? Clearly, it is impossible. From the conclusion [33] , if![]() , then
, then![]() , otherwise
, otherwise![]() , which is in conflict with that
, which is in conflict with that ![]() is measurable and limited. Therefore, in the continuous case,
is measurable and limited. Therefore, in the continuous case, ![]() cannot hold true. However, what about
cannot hold true. However, what about
the discrete case? The next section will answer.
3. The Discrete Heisenberg Uncertainty Principles
3.1. The Uncertainty Relation
First let us introduce a lemma.
Lemma 3:![]() , where
, where ![]() is the Frobenius matrix norm.
is the Frobenius matrix norm.
Proof: From the definition of the operator ![]() in definition 4, we have
in definition 4, we have
![]() .
.
Exchange the locations of the sum operators, we obtain
![]()
Hence, according to the definition of the Frobenius matrix norm [27] [34] and the definition of DFRFT, we have
![]() .
.
In the similar manner with the continuous case, we can obtain![]() . Since
. Since![]() , we have
, we have
![]() , thus, we get
, thus, we get![]() . Therefore, we can obtain the following theorem 2.
. Therefore, we can obtain the following theorem 2.
Theorem 2: Let ![]()
![]() be the DFRFT of the time sequence
be the DFRFT of the time sequence ![]()
![]() for transform parameter
for transform parameter ![]()
![]() , with
, with ![]()
![]()
![]()
![]() -concentrated on index set
-concentrated on index set ![]()
![]() . Let
. Let ![]()
![]() be the numbers of nonzero entries in
be the numbers of nonzero entries in ![]() (
(![]() respectively). Then
respectively). Then
![]() . (5)
. (5)
Here, we find that when![]() , (5) reduce to the traditional case in Theorem 3 [(3.9), 25].
, (5) reduce to the traditional case in Theorem 3 [(3.9), 25].
3.2. The Extensions
Set ![]() in theorem 2, we can obtain the following theorem 3 directly.
in theorem 2, we can obtain the following theorem 3 directly.
Theorem 3: Let ![]()
![]() be the DFRFT of the time sequence
be the DFRFT of the time sequence ![]()
![]() with length N.
with length N. ![]()
![]() counts the numbers of nonzero entries in
counts the numbers of nonzero entries in ![]() (
(![]() respectively). Then
respectively). Then
![]() . (6)
. (6)
Clearly, theorem 3 is a special case of theorem 2. Also, this theorem can be derived via theorem 1 in [26] .
Differently, we obtain this result in a different way. Here we note that since![]() , there is at least one non-zero element in every FRFT domain for
, there is at least one non-zero element in every FRFT domain for![]() . Therefore,
. Therefore, ![]() for
for![]() .
.
Through setting special value for ![]() in theorem 3, we have
in theorem 3, we have
Corollary 1:
![]() . (7)
. (7)
Proof: Now we prove corollary 1 in the sense of sampling and mathematical solution for better understanding these relations. Without loss of generality, we often assume that the continuous signal ![]() (the continuous version of
(the continuous version of![]() ) is band-limited, then
) is band-limited, then ![]() is obtained through sampling
is obtained through sampling![]() . From the sequence length N in the definition of DFRFT in (2), we know the sampling period defined as
. From the sequence length N in the definition of DFRFT in (2), we know the sampling period defined as![]() :
: ![]() (
(![]() implies this result). We assume there is no aliasing after sampling in the FRFT domain, then from the sampling
implies this result). We assume there is no aliasing after sampling in the FRFT domain, then from the sampling
Theorem, we know that all the energy of ![]() are limited within the scope
are limited within the scope ![]() [32] [35] , i.e., all the energy of
[32] [35] , i.e., all the energy of ![]() must be within
must be within ![]()
![]() . Without
. Without
loss of generality, we assume ![]() based on the shifting property of FRFT [6] [32] , i.e., all the energy of
based on the shifting property of FRFT [6] [32] , i.e., all the energy of
![]() must be within
must be within![]() . Let
. Let ![]() be the sites where
be the sites where ![]() is nonzero, and
is nonzero, and ![]()
![]() be the corresponding nonzero elements of
be the corresponding nonzero elements of![]() . Accordingly, from the definition of DFRFT
. Accordingly, from the definition of DFRFT
[6] [32] , we have
![]() and. (8)
and. (8)
We rewrite (8) in terms of matrices and vectors. Define the matrix![]() , where
, where![]() , then we obtain
, then we obtain
![]() ,
,
where![]() ,
, ![]() and
and![]() .
.
Clearly, ![]() is a
is a ![]() matrix, which includes
matrix, which includes ![]() matrixes with dimensions of
matrixes with dimensions of ![]()
so that we can rewrite matrix ![]() as
as
![]() and
and![]() , where
, where![]() .
.
From the definition of DFRFT, we know that the bases ![]() (for different
(for different
ks and![]() ) are mutually orthogonal [6] [32] . Therefore, the different rows are not correlated so that
) are mutually orthogonal [6] [32] . Therefore, the different rows are not correlated so that ![]()
![]() is nonsingular and
is nonsingular and ![]() can be rewritten as
can be rewritten as![]() . Since every ele-
. Since every ele-
ment in ![]() is not zero and
is not zero and ![]() is nonsingular, then there must be a non-zero element in
is nonsingular, then there must be a non-zero element in ![]() at least. Other
at least. Other
wise, ![]() , which is in conflict with
, which is in conflict with![]() . Therefore, in every
. Therefore, in every ![]()
![]() there is at least one non-zero element. Therefore, there are at least
there is at least one non-zero element. Therefore, there are at least ![]() non-zero elements in the DFRFT
non-zero elements in the DFRFT
domain in total. Thus, theorem 3 is verified.
Furthermore, we can obtain the following more general uncertainty relation associated with DFRFT.
Clearly, if ![]() and
and![]() , then the generalized uncertainty bounds are lower than the tradi-
, then the generalized uncertainty bounds are lower than the tradi-
tional cases. Therefore, the generalized uncertainty principles show that the resolution will be higher.
Theorem 4: Let ![]()
![]() be the DFRFT of the time sequence
be the DFRFT of the time sequence ![]() (
(![]() and
and![]() ) with length N and
) with length N and![]() .
. ![]() counts the number of nonzero elements in
counts the number of nonzero elements in![]() . Then
. Then
![]() , where
, where![]() . (9)
. (9)
Proof: From the assumption and the definition of DFRFT [6] [32] , we know
![]() for.
for.
where![]() ,
,![]() .
.
Therefore, let![]() , we have [26]
, we have [26]
![]()
where ![]() and
and ![]() with
with ![]() and
and ![]() with
with![]() .
.
Hence, we obtain
![]() .
.
Set![]() , then
, then
![]()
Using the triangle inequality, we have
![]() , hence
, hence
![]()
From ![]() and Parseval’s principle [6] , we obtain
and Parseval’s principle [6] , we obtain
![]() .
.
Hence
![]() .
.
Therefore, we obtain
![]()
Adding all the above inequalities, we have
![]() with.
with.
Similarly, from ![]() and Parseval’s principle [6] , we obtain
and Parseval’s principle [6] , we obtain![]() , hence
, hence
![]() .
.
From the definition and property of DFRFT [6] [32] we have
![]()
with![]() .
.
Hence, we finally obtain the proof
![]() with.
with.
4. The Simulation
In this section we give an example to show that the data in FRFT domains may have much higher concentration than that in traditional time-frequency domains.
Now considering the chirp signal![]() with
with ![]() and sampling period
and sampling period![]() ,
, ![]() (see Figure 1(a)).
(see Figure 1(a)).
Clearly, we can obtain from Figure 1 that![]() ,
, ![]() ,
,![]() . Therefore, we have
. Therefore, we have![]() . This verifies that the data in FRFT domains may have much higher concentration than that in traditional time-frequency domains. (Note here that if the transformed coefficient is less than 0.1, then we take it as zero value. See Figure 1(b) and Figure 1(c)).
. This verifies that the data in FRFT domains may have much higher concentration than that in traditional time-frequency domains. (Note here that if the transformed coefficient is less than 0.1, then we take it as zero value. See Figure 1(b) and Figure 1(c)).
5. Conclusion
In practice, we often process the data with limited lengths for both the continuous (ε-concentrated) and discrete signals. Especially for the discrete data, not only the supports are limited, but also they are sequences of data
![]()
![]()
![]() (a) (b) (c)
(a) (b) (c)
Figure 1. The simulation of a signal with its FRFT and FT. (a) The original signal in time domain; (b) The FT of the signal (i.e., the traditional frequency domain); (c) The FRFT of the signal (i.e., the FRFT domain).
points whose number of non-zero elements is countable accurately. This paper discussed the generalized uncertainty relations on FRFT in term of data concentration. We show that the uncertainty bounds are related to the FRFT parameters and the support lengths. These uncertainty relations will enrich the ensemble of FRFT. Moreover, these uncertainty relations will help finding the optimal filtering parameters [31] such as [6] [34] [36] . Our simulation also shows that the data in FRFT domains may have much higher concentration than that in traditional time-frequency domains.
Acknowledgements
We will thank Professor R. Tao very much for his valuable suggestions in improving our work. This work was fully supported by the NSFCs (61002052 and 61471412) and partly supported by the NSFC (61250006) and Third Term of 2110 in Dalian Navy Academy.
NOTES
*Corresponding author.