A General Class of Convexification Transformation for the Noninferior Frontier of a Multiobjective Program ()
1. Introduction
In this paper, we consider the following multiobjective optimization problem:

where k > 1 and  is a decision vector,
is a decision vector,  ,
,  are objective functions and
are objective functions and ,
,  are constraint functions.
are constraint functions.
Let  be the feasible region in the decision space and
be the feasible region in the decision space and

be the feasible region in the objective space. A solution  to Problem (P) is called noniferior solution if there is no other feasible solution
to Problem (P) is called noniferior solution if there is no other feasible solution  such that
such that ,
,  , with at least one strict inequality.
, with at least one strict inequality.
Let  be the set of all the noninferior solutions in the decision space and
be the set of all the noninferior solutions in the decision space and

be the set of noninferior points in the objective space and  is also called the noninferior frontier of Problem (P).
is also called the noninferior frontier of Problem (P).
An important problem in multiobjective optimization is to find the set of noninferior solutions. Many methods that are intended to identify noninferior solutions have been proposed such as the weighting method, weighting p-norm method, the ∞-norm method and the ξ-constraint method. Among these methods the weighting method is one of the simplest methods. In fact, the weighting method transforms multiple objectives into the following weighted sum by introducing weighting vector (w1,∙∙∙wk):

where
 . It is well-known that the optimal solution of Problem (SP) is the noninferior solution of Problem (P). Let
. It is well-known that the optimal solution of Problem (SP) is the noninferior solution of Problem (P). Let  be an optimal solution of Problem (SP) with
be an optimal solution of Problem (SP) with , then we have
, then we have
By the definition of supporting hyperplane we know that there exists a supporting hyperplane of  at
at , which is
, which is . Thus the existence of a supporting hyperplane at the noninferior solution in the
. Thus the existence of a supporting hyperplane at the noninferior solution in the  -space which separates all the noninferior points one side is a necessary condition to guarantee the successful finding of noninferior solutions of Problem (P) by using weighting method. However, in many nonconvex circumstances, supporting hyperplane does not exist at some points of the noninferior frontier. Therefore, weighting method always fails to identify all the noninferior solutions in these cases.
-space which separates all the noninferior points one side is a necessary condition to guarantee the successful finding of noninferior solutions of Problem (P) by using weighting method. However, in many nonconvex circumstances, supporting hyperplane does not exist at some points of the noninferior frontier. Therefore, weighting method always fails to identify all the noninferior solutions in these cases.
Recently, convexification method has been successfully adopted in many subjects of optimization. For example, in [1-3] a series of convexification methods are proposed to process some classes of global optimization problems with certain monotone properties and in [4,5] convexification schemes are presented to convexify the perturbation function and Lagrangian function in the dual search methods for nonlinear programming. In [6,7], a general convexification and concavification scheme are proposed for certain classes of monotone and nonmonotone optimization problems. The scheme converts the problems into classes of concave and reverse convex programming problems with better structures. Li et al derived a general convexification method for nonconvex minimization problems in [8]. Their method transforms the problems into convex ones and thus the local techniques can be used to solve the new problems. A reciprocal transformation for the convexification of posynomial programs with positive variables are presented in [9]. In [10-12], p-power and exponential generating method were used as a special convexification transformations and they proved that under certain assumptions, by applying the p-power or exponential generating method to objective function, the noninferior frontier of a multiobjective problem can be convexified completely or partly and then the weighting method can be applied to identify the noninferior solutions. However, due to the various forms of objective functions, p-power might not always serve as an efficient transformation. Thus the choice range of such transformations should be enlarged.
The main purpose of this paper is to present a class of general convexification transformation methods to convexify the noninferior frontier of a multiobjective problem. Compared with previous works, the major contributions of our paper are as follows:
• We prove that the noninferior frontier could be convexified completely or partially by applying a more general transformation under certain assumptions. Also, we generalized the results in [10].
• Our transformation further expands the class of multiobjective program that weighting method could solve by designing the transformation function based on the objective function. Our transformation can handle practical problems more efficiently than the one in [10] as well.
The paper is organized as follows: in Sections 2 and 3, a general form of transformation is proposed and then we prove that under some assumptions the noninferior frontier could be convexified completely or partly. In Section 4 some examples are given to vindicate our results. We give a conclusion about this paper in the last section.
2. Convexification of Noninferior Frontier
As in [10], the noninferior frontier of Problem (P) can be expressed as

where  is a nonincreasing function of
is a nonincreasing function of  at
at .
.
Consider the following transformation of the objective functions

where  is strictly increasing where
is strictly increasing where  is a parameter, and
is a parameter, and . Then Problem (P) is transformed to a new problem which reads
. Then Problem (P) is transformed to a new problem which reads

Let  be the sets of all the noninferior solutions for Problem (CP), then
be the sets of all the noninferior solutions for Problem (CP), then .
.
Proof. For any point , if
, if , then
, then  such that
such that
 , with at least one strict inequality. Without loss of generality, we assume
, with at least one strict inequality. Without loss of generality, we assume . Since
. Since  is strictly increasing, we must have
is strictly increasing, we must have , with strict inequality holds at
, with strict inequality holds at . Then
. Then  is not a noninferior point which contradicts the assumption. So,
is not a noninferior point which contradicts the assumption. So, . Therefore,
. Therefore, . Similarly, it can be shown that
. Similarly, it can be shown that .
.
The noninferior frontier of Problem (CP) can be expressed as
Let  be the Hessian matrix of
be the Hessian matrix of  and
and , where
, where  is the minimum eigenvalue of
is the minimum eigenvalue of . Further, we make the following assumptions:
. Further, we make the following assumptions:
I)  is a twice continuous differentiable function and
is a twice continuous differentiable function and  is negative for all
is negative for all , and
, and ,
,
 , where
, where  is positive. Moreover,
is positive. Moreover, 
II)  is twice differentiable and
is twice differentiable and


where  is a positive number.
is a positive number.
III)  is a compact set.
is a compact set.
Then we have the following theorem: Suppose that assumptions I)-III) are satisfied. Then there exists a  such that when
such that when  the noninferior frontier of Problem (CP) is convex.
the noninferior frontier of Problem (CP) is convex.
Proof. Let ,
,  , i = 1, 2,∙∙∙, k − 1, and
, i = 1, 2,∙∙∙, k − 1, and  denote the Hessian matrix of
denote the Hessian matrix of .
.
Then we have



when 

Let

 (2.1)
(2.1)

Then
 (2.2)
(2.2)
From (2.1) and (2.2), we have that  is a positive definite matrix if and only if
is a positive definite matrix if and only if  is a positive definite matrix.
is a positive definite matrix.
We assume that , otherwise
, otherwise  is already positive definite.
is already positive definite.
Further, let
where  denotes the unit sphere in
denotes the unit sphere in .
.
By II) and III), we have

Therefore, for , there exists
, there exists  such that for any
such that for any , we have
, we have

Then , we have
, we have
Then  is a positive definite matrix when
is a positive definite matrix when . Therefore, the noninferior frontier of Problem (CP) is convex when
. Therefore, the noninferior frontier of Problem (CP) is convex when  and we complete the proof.
and we complete the proof.
Corollary 2.2 Suppose that assumptions I)-III) are satisfied. Then there is a  such that the supporting hyperplane exists everywhere on the noninferior frontier of Problem (CP) when
such that the supporting hyperplane exists everywhere on the noninferior frontier of Problem (CP) when .
.
Proof. By theorem 2.2, there exists a  such that the noninferior frontier is convex everywhere when
such that the noninferior frontier is convex everywhere when , and then by [13] we know that the supporting hyperplane exists everywhere.
, and then by [13] we know that the supporting hyperplane exists everywhere.
Further by the discussion above, we can obtain the following corollary:
Corollary 2.2 Suppose that assumptions I)-III) hold. Then  is a noninferior solution of Problem (P) if and only if there exists a
is a noninferior solution of Problem (P) if and only if there exists a  such that
such that  is an optimal solution of Problem (CP) with
is an optimal solution of Problem (CP) with  when
when .
.
Remark 1. If we set , it is easy to verify that
, it is easy to verify that  satisfies assumption II). The primal problem could be transformed into the following problem:
satisfies assumption II). The primal problem could be transformed into the following problem:
 (2.3)
(2.3)
Note that (2.3) is exactly the transformation proposed in [10].
Remark 2. We can derive other types of transformations by constructing many specific function forms satisfying assumption II). For example, each of functions
 ,
,  ,
,  ,
,  , where
, where
 and
and ,
,  could be used as
could be used as .
.
3. Local Convexification of the Noninferior Frontier
In some cases, assumptions I)-III) may not hold simultaneously. For instance,  might not be twice continuous differentiable or
might not be twice continuous differentiable or . In these circumstances, it might be difficult to globally convexify the noninferior frontier, however, we can achieve the local convexification of the noninferior frontier. Assume that assumptions I)-III) hold in a compact neighborhood
. In these circumstances, it might be difficult to globally convexify the noninferior frontier, however, we can achieve the local convexification of the noninferior frontier. Assume that assumptions I)-III) hold in a compact neighborhood , then there exists a
, then there exists a  such that the Hessian matrix
such that the Hessian matrix  of
of  is positive definite for
is positive definite for  in the
in the  -space when
-space when .
.
Proof. Theorem 3.1 could be vindicated by the similar way used in the proof of Theorem 2.2.
Then similar to corollaries 2.1 and 2.2, we have the following corollaries:
Corollary 3.1 Suppose that assumptions I)-III) hold in a compact neighborhood , then there exists a p1 such that supporting hyperplane exists on the confined noninferior frontier sector
, then there exists a p1 such that supporting hyperplane exists on the confined noninferior frontier sector 
for all interior points of  when
when .
.
Corollary 3.2 Assume that a noninferior solution  has a compact neighborhood
has a compact neighborhood  and assumptions I)-III) hold in
and assumptions I)-III) hold in , then for
, then for  large enough there exists a
large enough there exists a  such that
such that  is a local optimal solution of Problem (P) with
is a local optimal solution of Problem (P) with .
.
4. Numerical Experiments
Example 1: Consider the following example:
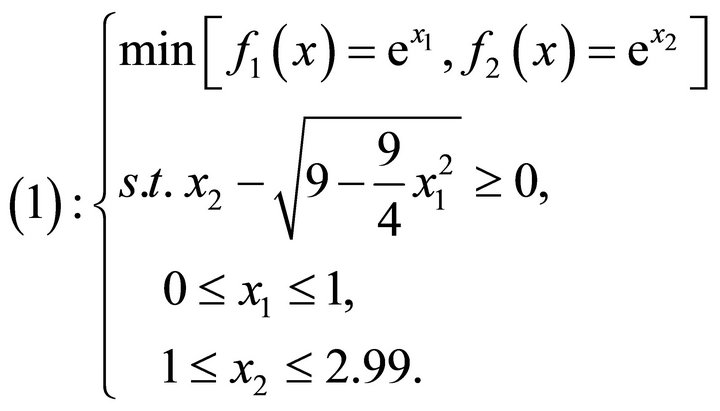
The noninferior frontier of Problem (1) is

Figure 1 depicts the feasible region of Problem (1). From Figure 1 we know that the noninferior frontier of Problem (1) is not convex, thus weighting method would not identify all the noninferior solutions in this case.
Let  and
and , then the Problem (1) could be transformed to the following problem:
, then the Problem (1) could be transformed to the following problem:
Then the noninferior frontier of Problem (2) is

Figure 2 depicts the noninferior frontier of Problem (2). Clearly, the noninferior frontier of Problem (2) is convex and then we can identify all the noninferior solution of Problem (2) by applying the weighting method. Also, it’s worthwhile to point out that compared to the transformation we used, the p-power transformation may produce a much more complicate problem.
Example 2: Consider the following example:

Figure 1. Feasible region and noninferior frontier of Problem (1).

Figure 2. Feasible region and noninferior frontier of Problem (2).

Figure 3 depicts the feasible region of Problem (3). From Figure 3 we know that the noninferior frontier of Problem (3) is nonconvex. Note that the noninferior frontier of Problem (3) can be expressed as

And the hessian matrix of  is
is .
.
It is evident that
which contradicts assumption I). Thus we might not be able to completely convexify the noninferior frontier of Problem (3) by using our transformation method. However we could achieve the local convexification.
Let  and
and , then the Problem (3) could be transformed to the following problem:
, then the Problem (3) could be transformed to the following problem:
Obviously, as shown in Figure 4, the noninferior frontier of Problem (4) is locally convex and then we can identify part of the noninferior solutions of Problem (4) by applying the weighting method.
5. Conclusion
As one of the simplest methods to identify the noninferior solutions of multiobjective problems, weighting method fails in many nonconvex cases. In this paper, a general class of convexification transformations is presented and we prove that the transformation could con-

Figure 3. Feasible region and noninferior frontier of Problem (3).
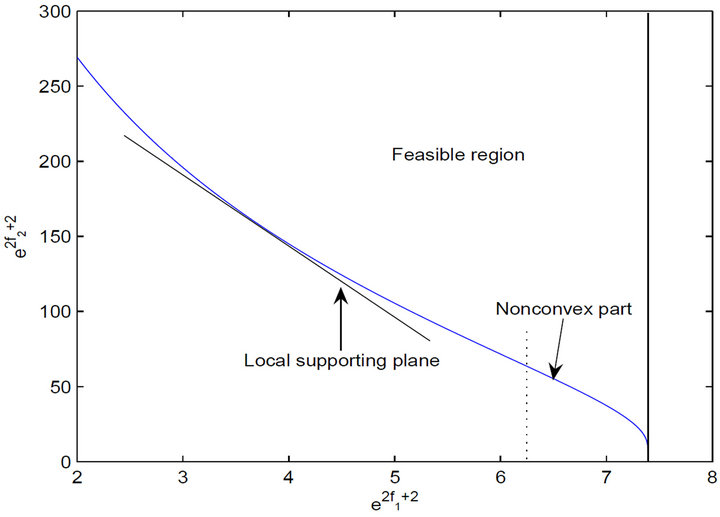
Figure 4. Feasible region and noninferior frontier of Problem (4).
vexify the noninferior frontier completely or partly under assumptions and then weighting method can be used successfully. This paper expands greatly the class of multiobjective programs that weighting method can cope with and provides more specific transformations to tackle practical problems efficiently.
6. Acknowledgements
The research was supported by National Natural Science Foundation of China under Project 10261005 and partially supported by National Natural Science Foundation of China under Project 10601030.