Variational Iterative Method Applied to Variational Problems with Moving Boundaries ()
1. Introduction
In modeling a large class of problems arising in science, engineering and economics, it is necessary to minimize amounts of a certain functional. Because of the important role of this subject, special attention has been given to these problems. Such problems are called variational problems, see [1,2].
The simplest form of a variational problem can be considered as
 (1)
(1)
where  is the functional which its extremum must be found. Functional
is the functional which its extremum must be found. Functional  can be considered by two kinds of boundary conditions. In the fixed boundary problems, the admissible function
can be considered by two kinds of boundary conditions. In the fixed boundary problems, the admissible function  must satisfy following boundary conditions
must satisfy following boundary conditions
 (2)
(2)
In moving boundary problems, at least one of the boundary points of the admissible function is movable along a boundary curve. Further more many applications of the calculus of variations lead to problems in which not only boundary conditions, but also a quite different type of conditions known as constraints, are imposed on the admissible function. The necessary condition for the admissible solutions of such problems has to satisfy the Euler-Lagrange equation which is generally nonlinear.
In this work we consider He’s variational iterative method as a well known method for finding both analytic and approximate solutions of differential equations. Here, the problem is initially approximated with possible unknowns. Then a correction functional is constructed by a general Lagrange multiplier, which can be identified optimally via the variational theory [3].
Variational iterative method is applied on various kinds of problems [4-31].
Author of [32] solved variational problems with moving boundaries with Adomian decomposition method. Variational iterative method was applied to solve variational problems with fixed boundaries (see [11,27,30]). In this work we obtain exact solution of variational problems with moving boundaries and isoperimetric problems by variational iterative method. In fact, variational iterative method is applied to solve the Euler-Lagrange equation with prescribed boundary conditions. To present a clear overview of the procedure several illustrative examples are included.
2. Variational Iterative Method
In variational iterative method which is stated by He [3], solutions of the problems are approximated by a set of functions that may include possible constants to be determined from the boundary conditions. In this method the problem is considered as
 , (3)
, (3)
where  is a linear operator, and
is a linear operator, and  is a nonlinear operator.
is a nonlinear operator.  is an inhomogeneos term. By using the variational iterative method, the following correct functional is taken into account
is an inhomogeneos term. By using the variational iterative method, the following correct functional is taken into account
 (4)
(4)
where  is Lagrange multiplier [5], the subscript n denotes the n-th approximation,
is Lagrange multiplier [5], the subscript n denotes the n-th approximation,  is as a restricted variation i.e.
is as a restricted variation i.e.  [6-8]. Taking the variation from both sides of the correct functional with respect to yn and imposing
[6-8]. Taking the variation from both sides of the correct functional with respect to yn and imposing , the stationary conditions are obtained. By using the stationary conditions the optimal value of the
, the stationary conditions are obtained. By using the stationary conditions the optimal value of the  can be identified.
can be identified.
The successive approximation  can be established by determining a general lagrangian multiplier
can be established by determining a general lagrangian multiplier  and initial solution
and initial solution . Since this procedure avoids the discretization of the problem, it is possible to find the closed form solution without any round off error.
. Since this procedure avoids the discretization of the problem, it is possible to find the closed form solution without any round off error.
In the case of m equations, the equations are rewritten in the form of:
 (5)
(5)
where  is a linear with respect to
is a linear with respect to , and
, and  is nonlinear part of the ith equation. In this case the correct functionals are produced as
is nonlinear part of the ith equation. In this case the correct functionals are produced as
 (6)
(6)
and the optimal values of the  are obtained by taking the variation from both sides of the correct functionals and finding stationary conditions using
are obtained by taking the variation from both sides of the correct functionals and finding stationary conditions using 。
。
3. Statement of the Problem
3.1. Moving Boundary Problems
The necessary condition for the solution of problem (1) is to satisfy the Euler-Lagrange equation
 (7)
(7)
The general form of the variational problem (1) is
 (8)
(8)
Here, the necessary condition for the extermum of the functional (8) is to satisfy the following system of second-order differential equations
 (9)
(9)
In fixed boundary problems, Euler-Lagrange equation must be considered by the boundary conditions, but for the problems with variable boundaries, Euler-Lagrange equation must satisfy natural boundary conditions or transversality conditions which will be described in the following theorems.
For the problems with variable boundaries, we have two cases:
Type 1: As the first case, those problems are considered for which at least one of the boundary points move freely along a line parallel to the y-axis. Indeed at this point  is not specified. In this case all admissible functions have the same domain
is not specified. In this case all admissible functions have the same domain  and satisfy the Euler-Lagrange equation in this interval. Furthermore such functions have to satisfy conditions called natural boundary conditions stated in the following theorem.
and satisfy the Euler-Lagrange equation in this interval. Furthermore such functions have to satisfy conditions called natural boundary conditions stated in the following theorem.
Theorem 3.1. Suppose the function  in
in , yields a relative minimum of the functional (1) that for which
, yields a relative minimum of the functional (1) that for which ,
,  is arbitrary (free right endpoint) and
is arbitrary (free right endpoint) and  are arbitrary (free endpoints). Then
are arbitrary (free endpoints). Then  satisfies, the following natural boundary conditions, respectively:
satisfies, the following natural boundary conditions, respectively:
 (10)
(10)
or
 (11)
(11)
Type 2: For the second case, the beginning and end points (or only one of them) can move freely on given curves . In this case, a function
. In this case, a function 
 is required, which emanates at some
is required, which emanates at some  from the curve
from the curve  and terminates for some
and terminates for some  on the curve
on the curve  and minimizes the functional (1). In this problem, the points
and minimizes the functional (1). In this problem, the points  are not known, and they must satisfy the necessary conditions called transversality conditions, described in the following theorem.
are not known, and they must satisfy the necessary conditions called transversality conditions, described in the following theorem.
Theorem 3.2. If the function
 , which emanates at some
, which emanates at some from the curve
from the curve  and terminates for some
and terminates for some  on the curve
on the curve  , yields a relative minimum for functional (1), where
, yields a relative minimum for functional (1), where
 , R being a domain in the
, R being a domain in the  space that contains all lineal elements of
space that contains all lineal elements of , then it is necessary that
, then it is necessary that 
 to satisfy the Euler-Lagrange equation in the interval
to satisfy the Euler-Lagrange equation in the interval  and at the point of exit and the point of entrance, the following transversality conditions to be satisfied:
and at the point of exit and the point of entrance, the following transversality conditions to be satisfied:
 (12)
(12)
 (13)
(13)
In the case that one of the points is fixed, then the transversality condition has to be held at the other point.
One can consider transversality conditions for the problems with more than one unknown functions. For example, in to minimize two dimensional case, a vector function  is looked for such that
is looked for such that
 (14)
(14)
in which  and the endpoint lies on a two-dimensional surface that is given by
and the endpoint lies on a two-dimensional surface that is given by . Here the transversality conditions at
. Here the transversality conditions at  are:
are:
 (15)
(15)
 (16)
(16)
In which  is an admissible vector function.
is an admissible vector function.
For further information on transversality conditions, specially for the proofs of Theorems 3.1 and 3.2 and conditions (15), (16), see [2].
Example 3.1. Consider the following functional:
 (17)
(17)
In which 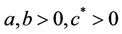 and
and  is the amount of a capital at time t (see [1]).
is the amount of a capital at time t (see [1]).
Here, the capital stock  at the initial time
at the initial time  of the planning period is assumed to be known:
of the planning period is assumed to be known: ; on the other hand, the planner won’t wish to explain how large the capital would be at time
; on the other hand, the planner won’t wish to explain how large the capital would be at time . Therefore, there is a variational problem with free right endpoint. Here we let
. Therefore, there is a variational problem with free right endpoint. Here we let , and
, and  which has the analytical solution
which has the analytical solution  The corresponding Euler-Lagrange equation is:
The corresponding Euler-Lagrange equation is:

Now natural boundary condition at  is as following:
is as following:

Therefore, the following boundary conditions are:
 (18)
(18)
By using variational iterative method we consider the following functional is considered:

Taking the variation from both sides of the correct functional with respect to  given:
given:

For all variations  and
and . The following stationary conditions are obtained:
. The following stationary conditions are obtained:
 ,
,


So that . Therefore iterative formula can be found as:
. Therefore iterative formula can be found as:

If  then
then

By imposing (18)  are resulted. Which yields the exact solutions of the problem (see Figure 1).
are resulted. Which yields the exact solutions of the problem (see Figure 1).
Example 3.2. We want to find the shortest distance from the point  to the sphere
to the sphere

This problem is reduced to optimize the following functional:
 (19)
(19)
where the point  must lie on the sphere, with the exact solution
must lie on the sphere, with the exact solution , see [33]. The corresponding Euler Lagrange equations for this problem
, see [33]. The corresponding Euler Lagrange equations for this problem
Figure 1. The graphs of approximated and exact solution for Example 3.1.
are:

So that

In above equations “e” and “f” are constant, so they can be rewritten as:

The transversality conditions are:
 (20)
(20)
 (21)
(21)
By using variational iteration method results:

and

The variation from both sides of above equations for finding the optimal value of  is:
is:

and

Therefore
 .
.
and

which yields:

So that the following iterative formulas are obtained:


If  then we have:
then we have:

and

By choosing ,
,

Imposing (20) and (21) lead to,  therefore:
therefore:

which is the exact solution.
3.2. Isoperimetric Problems
Assume that two functions  and
and  are given. Among all curves
are given. Among all curves  along which the functional
along which the functional

assumes a given value l, determine the one for which the functional

Gives an extermal value. Suppose that F and G have continuous first and second partial derivatives for  and for arbitrary values of the variables
and for arbitrary values of the variables  and
and .
.
Euler’s theorem: If a curve  extremizes the functional J
extremizes the functional J  under the conditions
under the conditions


and if  is not an extremal of the functional K, there exists a constant
is not an extremal of the functional K, there exists a constant  such that the curve
such that the curve  is an extremal of the functional
is an extremal of the functional

The necessary condition for the solution of this problem is to satisfy the Euler-Lagrange equation

with given boundary conditions in which  for further information (see [2]).
for further information (see [2]).
Example 3.3. It is aimed to find the minimum of the functional
 (22)
(22)
Such that
 (23)
(23)
and
 (24)
(24)
With exact solution  [19]. According to the following auxiliary functional:
[19]. According to the following auxiliary functional:

and the corresponding Euler-Lagrange equation:

so

By applying He’s variational iterative method results

To find the optimal value of  following equation is required:
following equation is required:

Therefore, the stationary conditions are obtained in the following form:

which yields

and the desired sequence is

By choosing 

Imposing (24) on this function given
 (25)
(25)
If  then from (24)
then from (24)  but from (23)
but from (23)  which is a contradiction.
which is a contradiction.
Now imposing (24), we have: 
so  and it is known that in this case imposing (24) on the Euler Lagrange equation yields
and it is known that in this case imposing (24) on the Euler Lagrange equation yields

Hence:

and from (23) . But y must be extremal when
. But y must be extremal when  , therefore:
, therefore:

As it is observed that this solution is equal to exact solution (see Figure 2).
Example 3.4. The objective is to find an extremum of the functional
 (26)
(26)
Such that
 (27)
(27)
and

Figure 2. The graphs of approximated and exact solution for Example 3.3.
 (28)
(28)
With exact solution ,
,  , see [33]. By having the following auxiliary functional:
, see [33]. By having the following auxiliary functional:

The system of Euler-Lagrange equations is in the form:
 .
.
So

By using Homotopy variational iterative method gives:

Now

therefore

Hence

and

so

So  is obtained as:
is obtained as:

and the following iterative equations are obtained:
 ,
,

By choosing :
:

And by imposing (28) on this functions:

from (27):

And consequently:

Figure 3. The graphs of approximated and exact solution for Example 3.4.
 .
.
which is the exact solution (see Figure 3).
4. Conclusion
The He’s variational iterative method is an efficient method for solving various kinds of problems. In this paper variational iterative method is employed for finding the minimum of a functional with moving boundaries and isoperimetric problems. Using He’s variational iterative method the solution of the problem is provided in a closed form. Since this method does not need to the discretize of the variables, there is no computational round off error. Moreover, only a few numbers of iterations are needed to obtain a satisfactory result.