Bayesian and Non-Bayesian Estimation of the Inverse Weibull Model Based on Generalized Order Statistics ()
1. Introduction
Udo Kamps [1,2] has introduced GOS as random variables having certain joint density function, which includes as a special case the joint density functions of many models of ordered random variables such as ordinary order statistics (OS) (David [3], Castillo [4] and Arnold, Balakrishnan and Nagaraja [5]), sequential order statistics (SOS) (Cramer and Kamps [6,7]), record values, Kth record values, and Pfeifer’s records (Nevzorov [8] and Ahsanullah [9]), Progressive Type-II censoring order statistics (PCOS) (Soliman [10-13], Balakrishnan and Asgharzadeh [14], and Sarhan, Ammar and Abuammoh [15]). The structural similarities of these models are based on the similarity of their joint density function. Therefore, all of these models are contained in the model of GOS.
For Bayesian estimates, the performance depends on the form of the prior distribution and the loss function assumed. The prior information can be expressed by the experimenter, who has some belifs about the parameters of his parametric model. Traditionally, most authors use the simple quadratic loss function and obtain the posterior mean as the Bayesian estimate. However, in practice, the real loss function is often not symmetric. For example, the conesquences of overestimates, in loss of human life, are much more serious than the consequences of underestimates. In this case an asymmetric loss function is more appropriate. Recently, many authors consider asymmetric loss functions in reliability, such as [Wahed [16], Alicja [17], Abd Ellah [18-20] and Sultan [21].
In this paper based on n selected GOS from the inverse Weibull model, we consider the problem of Bayesian and non-Bayesian estimation for parameters and reliability function of the model. This was done under assumption of discrete-continous mixture prior for the unknown parameters. It well know that in Bayesian setting, for making optimum decision, importance should be given on the choice of loss function and not just the choice of prior distribution. So, the results are presented under the balanced versions of symmetric and asymmetric loss functions. Progressively type-II censored and record values as a special case of GOS are considered. The rest of paper is organized as follows. In Section 2, we first present some preliminaries.
2. Preliminaries
2.1. The Model and the Concept of the GOS
The IWD plays an important role in many applications, including the dynamic components of diesel engines and several data set such as the times to breakdown of an insulating fluid subject to the action of a constant tension; see Nelson [22]. Calabria and Pulcini [23] provide an interpretation of the IWD in the context of the load-strength relationship for a component. Recently, Maswadah [24] has fitted the IWD to the flood data reported in Dumonceaux and Antle [25]. For more details on the IWD, see, for example Murthy et al. [26]. The two parameter IWD has probability density function (pdf) cumulative distribution function (cdf) and reliability function S(t) which are given respectively as
 (1)
(1)
 (2)
(2)
and the reliability function at time t is
 (3)
(3)
where  and
and  are scale and shape parameters respectively.
are scale and shape parameters respectively.
We recall the concept of GOS (cf. Kamps [1]).
Let  and
and  then the random variables
then the random variables 


are called the generalized order statistics if their joint pdf is given by
 (4)
(4)
For , where
, where

2.2. Balanced Type Loss Functions
The class of balanced type loss function (BLF) we can write it in the form (see Ahmadi et al. [27]).
 (5)
(5)
where  estimating of parameter
estimating of parameter ,
,  a prior target estimator of
a prior target estimator of ,
, ,
, being as arbitrary loss function in estimating
being as arbitrary loss function in estimating  by
by  and
and  suitable positive weight function. In this paper we shall use balanced squared error loss (balanced SEL) and balanced LINEX loss function to illustrate Bayesian estimation of parameters of inverse Weibull.
suitable positive weight function. In this paper we shall use balanced squared error loss (balanced SEL) and balanced LINEX loss function to illustrate Bayesian estimation of parameters of inverse Weibull.
2.2.1. Balanced Squared Error Loss Function
The balanced SLE is obtained with the choice of
 and
and  in (5), and given by
in (5), and given by
 (6)
(6)
and the Bayes estimation of  under
under  is given by
is given by
 (7)
(7)
2.2.2. Balanced LINEX Loss Function
The balanced LINEX loss function with shape parameter , is obtained with the choice of
, is obtained with the choice of
 and
and  in (5), and given by
in (5), and given by
 (8)
(8)
and the Bayes estimation of  under
under  is given by
is given by
 (9)
(9)
3. Maximum Likelihood Estimation (MLE)
Let  are n GOS drawn from inverse Weibull distribution whose pdf is given by (1), based on this set of GOS the log-likelihood function is
are n GOS drawn from inverse Weibull distribution whose pdf is given by (1), based on this set of GOS the log-likelihood function is
 (10)
(10)
If both of the parameters  and
and  are unknowntheir MLEs,
are unknowntheir MLEs,  and
and  can be obtained by solving the following likelihood equations
can be obtained by solving the following likelihood equations
 (11)
(11)
 (12)
(12)
The required estimates  and
and  are to be found by solving simultaneously the two Equations (11) and (12). Clearly that the calculation of the MLE requires iterative procedures. We can use the well known Newton-Raphson technique. By moving any point along in the direction determined by the information matrix and the first derivative of the log-likelihood function, we can iteratively improved the starting estimates to MLE, for details see Lawless [28]. For a given t, the corresponding MLE
are to be found by solving simultaneously the two Equations (11) and (12). Clearly that the calculation of the MLE requires iterative procedures. We can use the well known Newton-Raphson technique. By moving any point along in the direction determined by the information matrix and the first derivative of the log-likelihood function, we can iteratively improved the starting estimates to MLE, for details see Lawless [28]. For a given t, the corresponding MLE  of the reliability function
of the reliability function  my be obtained by replacing
my be obtained by replacing  and
and  by
by  and
and  in (4).
in (4).
3.1. Special Cases
In general, it is not easy to find a natural interpretation of generalized order statistics in terms of observed random samples. So, an interesting special cases such as the progressive Type II censored order statistics and record values have been used. These models are the most applicable general models of ordered random variables and is useful in reliability and life time studies. Several authors have addressed inferential issues based on progressive Type-II censored samples (for example, see Balakrishnan and Sandhu [14], Aggarwala and Balakrishnan [29] Ng et al. [30], Balakrishnan et al. [31] and Soliman [10-13]. One may refer to Balakrishnan [32,33] for a recent overview of various developments relating to progressive censoring. Also, record values arise in a wide variety of practical situations. Examples include industrial stress testing, meteorological analysis, hydrology, seismology, sporting and athletic events, and oil and mining surveys. Properties of record values have been studied extensively in the literature. Interested readers may refer to the books by Nevzorov [8] and Arnold et al. [34,35].
In this section we will consider two special cases of GOS, namely, the progressively Type-II censored sample and lower record values.
3.1.1. Progressively Type-II Censored Data
A progressively Type-II censored sample is observed as follows: n units are placed on a life-testing experiment and only m ≤ n are completely observed until failure. The censoring occurs progressively in m stages. The m stages are failure times of m completely observed units. At the time of the first failure (the first stage), R1 of (n – 1) surviving units are randomly withdrawn from the experiment, R2 of the (n – R1 – 2) surviving units are withdrawn at the time of the second failure (the second stage) and so on. Finally, at the time of the mth failure (the mth stage), all the remaining (Rm – n – m – R1 – – Rm–1) surviving units are withdrawn. We will refer this to as progressively Type-II censoring scheme (R1, R2,
– Rm–1) surviving units are withdrawn. We will refer this to as progressively Type-II censoring scheme (R1, R2,  , Rm) Then, we shall denote the m completely observed failure times by
, Rm) Then, we shall denote the m completely observed failure times by 
The progressively Type-II censored sample 
 with censoring scheme
with censoring scheme  and
and
 is a special case of the GOS with the parameters
is a special case of the GOS with the parameters  and
and  see Burkschat et al. [36].
see Burkschat et al. [36].
From Equations (11) and (12) the required estimates
 and
and  in progressively Type-II censored are to be found by solving simultaneously the following two equations
in progressively Type-II censored are to be found by solving simultaneously the following two equations
 (13)
(13)
 (14)
(14)
The ML estimate of reliability  is given by
is given by
 (15)
(15)
where  and
and  are be found from the numerical solution of the Equations (13) and (14).
are be found from the numerical solution of the Equations (13) and (14).
3.1.2. Lower k-Record Values
Let  be a sequence of independent and identically (iid) continuous random variables with cumulative distribution function (cdf)
be a sequence of independent and identically (iid) continuous random variables with cumulative distribution function (cdf)  and probability density function (pdf)
and probability density function (pdf)  An observation
An observation  is defined to be an lower record if
is defined to be an lower record if  for every
for every  and an analogous definition can be given for upper records ( with the inequality being reversed ). The record values is special case of GOS, in which if we put
and an analogous definition can be given for upper records ( with the inequality being reversed ). The record values is special case of GOS, in which if we put 
 and replacing
and replacing  by
by  in (10), then the log-likehood of lower k-record values is given by
in (10), then the log-likehood of lower k-record values is given by
 (16)
(16)
the ML estimates of  and
and  can be obtained from (16) by solving the following two equations as then
can be obtained from (16) by solving the following two equations as then
 (17)
(17)
The ML estimate of reliability  is given by
is given by
 (18)
(18)
where  and
and  are given by (17).
are given by (17).
4. Bayes Estimation
In this section, we estimate the two parameters  and
and  of IWD and The reliability
of IWD and The reliability  based on GOS by considering both of balanced SEL and balanced LINEX loss function. Progressively type-II censored and k-record values as a special case of GOS are considered.
based on GOS by considering both of balanced SEL and balanced LINEX loss function. Progressively type-II censored and k-record values as a special case of GOS are considered.
4.1. Bayes Estimation Based on GOS
When both of the two parameters  and
and  are assumed to be unknown, Soland [37] considered a family of joint prior distributions that places continuous distributions on the scale parameter and discrete distributions on the shape parameter.
are assumed to be unknown, Soland [37] considered a family of joint prior distributions that places continuous distributions on the scale parameter and discrete distributions on the shape parameter.
Suppose that the shape parameter  is restricted to a finite number of values
is restricted to a finite number of values  with respective prior probabilities
with respective prior probabilities  such that
such that 

and  Further, suppose that conditional upon
Further, suppose that conditional upon ,
,  has a natural gamma
has a natural gamma 
 prior, with a density
prior, with a density
 (19)
(19)
by using the Bayes theorem, the conditional posterior density function of  is given by
is given by
 (20)
(20)
 (21)
(21)
where  (22)
(22)
On applying the discrete version of Bayes theorem, the marginal probability distribution of  is given by
is given by
 (23)
(23)
where
 (24)
(24)

and  (25)
(25)
4.1.1. Bayes Estimation Based on Balanced SEL
From (21) the Bayes estimates of ,
,  and
and  in GOS under balanced SEL can be obtained, respectively as
in GOS under balanced SEL can be obtained, respectively as
 (26)
(26)
 (27)
(27)
and
 (28)
(28)
where  and
and  are to be found by solving (11) and (12),
are to be found by solving (11) and (12),  A1, pj and
A1, pj and  are given respectively, by (15), (22), (23) and (25).
are given respectively, by (15), (22), (23) and (25).
4.1.2. Bayes Estimation Based on Balanced LINEX Loss Function
From (21) the Bayes estimates of ,
,  and
and  in GOS under balanced LINEX loss function can be obtained, respectively as
in GOS under balanced LINEX loss function can be obtained, respectively as
 (29)
(29)
 (30)
(30)
and
 (31)
(31)
where  and
and  are to be found by solving (11) and (12),
are to be found by solving (11) and (12),  A1, pj and
A1, pj and  are given respectively, by (15), (22) , (23) and (25).
are given respectively, by (15), (22) , (23) and (25).
4.2. Special Cases
In this subsection we will consider two special cases of gos, the progressively type-II censored sample and lower record values.
4.2.1. Progressively Type-II Censored Data
From Equations (26), (27) and (28) the Bayes estimates of ,
,  and
and  in progressively type-II censored data under balanced SEL, are given respectively by
in progressively type-II censored data under balanced SEL, are given respectively by
 (32)
(32)
 (33)
(33)
and
 (34)
(34)
And From Equations (29), (30) and (31) the Bayes estimates of ,
,  and
and  in progressively type-II censored data under balanced LINEX loss function, given respectively by
in progressively type-II censored data under balanced LINEX loss function, given respectively by
 (35)
(35)
 (36)
(36)
and
 (37)
(37)
where


and 
 (38)
(38)
4.2.2. Lower k-Record Values
From (21), (22) and (27) in Lower k-record values the Bayes estimates of ,
,  and
and  under balanced SEL, given respectively by
under balanced SEL, given respectively by
 (39)
(39)
 (40)
(40)
and
 (41)
(41)
Similarly From (21), (22) and (27) in Lower k-record values the Bayes estimates of 
 and
and  under balanced LINEX loss function respectively, are given
under balanced LINEX loss function respectively, are given
 (42)
(42)
 (43)
(43)
and
 (44)
(44)
where
 (45)
(45)
5. Bootstrap Statistical Inference
The bootstrap is a resembling method for statistical inference. It is commonly used to estimate confidence intervals, but it can also be used to estimate bias and variance of an estimator or calibrate hypothesis tests. Bootstrapping is carried out by having an original data set  and sampling from an estimate of the cumulative distribution function (cfd) of
and sampling from an estimate of the cumulative distribution function (cfd) of  such that there are H re-sampled data sets. The re-sampled data set will be denoted as Xi = (Xi1, Xi2,
such that there are H re-sampled data sets. The re-sampled data set will be denoted as Xi = (Xi1, Xi2,  , Xin), i = 1, 2,
, Xin), i = 1, 2,  , H. Inferences for the quantity
, H. Inferences for the quantity , where
, where
 is the vector of parameters, generally employ a test statistic, denoted as
is the vector of parameters, generally employ a test statistic, denoted as . In order to estimate the sampling distribution of
. In order to estimate the sampling distribution of , two methods are employed, the nonparametric and parametric bootstrap methods. The parametric bootstrap method involves having a mathematical model whose parameters that completely determine the probability density function (pdf) of
, two methods are employed, the nonparametric and parametric bootstrap methods. The parametric bootstrap method involves having a mathematical model whose parameters that completely determine the probability density function (pdf) of 
 , while the nonparametric one is used when there is not an explicitly given mathematical model to use, but it is assumed that the re-sampled data sets are independently and identically distributed (iid). The following algorithm to describe the percentile bootstrap method as:
, while the nonparametric one is used when there is not an explicitly given mathematical model to use, but it is assumed that the re-sampled data sets are independently and identically distributed (iid). The following algorithm to describe the percentile bootstrap method as:
Algorithm A: Percentile bootstrap algorithm 1) From an original data set , draw H independent bootstrap samples
, draw H independent bootstrap samples ,
,  ,
,  ,
,  with replacement, each of size n.
with replacement, each of size n.
2) Compute  and
and  , i = 1, 2,
, i = 1, 2, , H in progrisseve type II censored from numerical solution of (13) and (14), and from numerical solution of (17) in lower record values.
, H in progrisseve type II censored from numerical solution of (13) and (14), and from numerical solution of (17) in lower record values.
3) Calculate the mean of all values in  and
and .
.
4) Sort the values  and
and  in ascending order to obtain the bootstrap samples
in ascending order to obtain the bootstrap samples
 and
and 
5) A two-sided  percentile bootstrap confidence interval for
percentile bootstrap confidence interval for  and
and  is defined, respectively, by
is defined, respectively, by
 and
and 
(See Efron [38] and Efron et al. [39] for detailed discussion).
6. Application Example
In this section, two example have been included in an attempt to illustrate the use of lower record values and progressive type II censored in estimating the parameter and reliability.
6.1. Lower Record Values
Example 1. (Real data)
We consider the real data set from Wiebull distribution as given by Nelson [22], concerning the data on time to breakdown of an insulating fluid between electrodes at a voltage of 34 KV (minutes). The 19 time to breakdown are 0.96, 4.15, 0.19, 0.78, 8.01, 31.75, 7.35, 6.50, 8.27, 33.91, 32.52, 3.16, 4.85, 2.78, 4.67, 1.31, 12.06, 36.71, 72.89.
Then the real data set from Inverse Wiebull distribution are 1.04, 0.24, 5.26, 1.28, 0.124, 0.031, 0.136, 0.154, 0.121, 0.029, 0.0314, 0.32, 0.21, 0.36, 0.214, 0.76, 0.082, 0.027, 0.013.
Therefore, we observe the following lower record values:
1.04, 0.24, 0.124, 0.031, 0.029, 0.027, 0.013.
We can obtain the values of  by using the expected values of the reliability
by using the expected values of the reliability ;
;
 (46)
(46)
Now suppose that the prior beliefs about the distribution enable one to specify two values  and
and . Then the values of
. Then the values of  can by obtained numerically from (46). If there are no prior beliefs, a nonparametric approach can be used to estimate the two values of
can by obtained numerically from (46). If there are no prior beliefs, a nonparametric approach can be used to estimate the two values of  by using
by using
 (47)
(47)
See Martez and Waller [40].
By using the nonparametric approach of the reliability function , we set t1 = 0:.031 and t2 = 0.124 in (47), we get S(t1) = 0:5 and S(t2) = 0.36.
For =10 concerning the value of the MLE of the parameter  which be found by solving the Equation (17),
which be found by solving the Equation (17),
 , we assume that
, we assume that  takes the values:
takes the values:
(0.3 (0.05) 0.75) with equal probabilities each of 0.1. Then the values of the hyper-parameters 
 at each value of
at each value of  are obtained by solving the following equations using Newton-Raphson method.
are obtained by solving the following equations using Newton-Raphson method.


Table 1 shows the values of the hyper-parameters and posterior probabilities obtained for each .
.
By using the algorithm A and the entries of Table 1, the bootstrap estimate, the ML estimate and the Bayes estimates of ,
,  , and
, and  are presented in Table 2.
are presented in Table 2.
By using the real data of lower record values in Algorithm A the confidence intervals of ,
,  , and
, and  are presented in Table 3.
are presented in Table 3.
6.2. Progressive Type II Censored
Example 2. (Real data) We will take the same values in

Table 1. Prior information, hyper-parameters and the posterior probabilities.
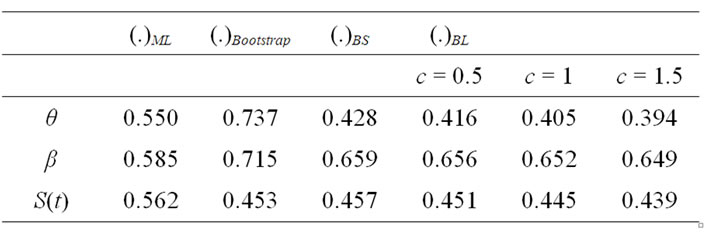
Table 2. The ML, Bayes and bootstrap estimates of θ, β and S(t) with t = 0.5 and ω = 0.2.

Table 3. Two-sided 90% and 95% confidence intervals of θ, β and S(t) by bootstrap estimate.
example 1.
0.013; 0.027; 0.029; 0.0307; 0.0314; 0.082; 0.121; 0.124; 0.136; 0.154; 0.21; 0.214; 0.24; 0.32;0.36; 0.76; 1.04; 1.28; 5.26. This data have come from the Inverse Wiebull distribution then the MLEs of  and
and , using a Newton-Raphson method are obtained as
, using a Newton-Raphson method are obtained as  = 0.635814 and
= 0.635814 and  = 0.825806, so
= 0.825806, so  = 0.620716, at t = 0.6.
= 0.620716, at t = 0.6.
We will use the expected value of  to find the values of the hyper-parameters
to find the values of the hyper-parameters  and
and  for Known
for Known ,
, .
.

These two prior probabilities are substituted into (46), where  and
and  are solved numerically for each given
are solved numerically for each given ,
,  using Newton-Raphson methods (in Table 4).
using Newton-Raphson methods (in Table 4).
Table 5 shows the values of the hyper-parameters and posterior probabilities obtained for each .
.
By using the algorithm A and the entries of Table 5, the bootstrap estimate, the ML estimate and the Bayes estimates of ,
,  , and
, and  are presented in Table 6.
are presented in Table 6.

Table 4. Progressive type II censored sample (m = 8, n = 9) from Nelson (1982).

Table 5. Prior information and posterior probabilities.

Table 6. The ML, Bayes and bootstrap estimates of θ, β and S(t) with t = 0.6 and ω = 0.2.

Table 7. Two-sided 90% and 95% confidence intervals of θ, β and S(t) by bootstrap estimate.
By using the real data of progressive type II censored sample in Algorithm A the confidence intervals of ,
,  , and
, and  are presented in Table 7.
are presented in Table 7.