Proximal Methods for Elliptic Optimal Control Problems with Sparsity Cost Functional ()
Received 17 March 2016; accepted 27 May 2016; published 30 May 2016

1. Introduction
A representative formulation of optimal control problems with  control costs is the following
control costs is the following
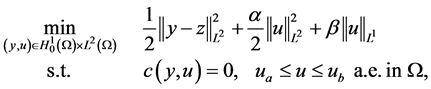 (1.1)
(1.1)
On the other hand, in the field of signal acquisition and reconstruction, l1-based optimization and sparsity have been exploited to successfully recover “functions” from few samples; see, e.g., [8] - [10] .
In this framework, it was shown [11] that l1-based inverse problems in signal recovery can be very efficiently solved by proximal methods. Nowadays, these iterative schemes are the method of choice in magnetic resonance imaging and a special proximal method called “Fast Iterative Soft Thresholding Algorithm” (FISTA) [12] is con- sidered the state-of-the-art method for solving finite-dimensional optimization problems of the following form
where the rectangular matrix A represents a blur operator.
The purpose of our work is to contribute to the field of PDE-based optimization with  control costs by investigating proximal methods in this infinite-dimensional setting. In particular, we aim at implementing and analysing proximal schemes for solving (1.1) that exploit first-order optimality conditions. Our investigation is motivated by the fact that proximal methods may have a computational performance that is comparable to that of semismooth Newton methods. However, in contrast to the latter, proximal schemes do not require the con- struction of second-order derivatives and the implementation of, e.g., a Krylov solver.
control costs by investigating proximal methods in this infinite-dimensional setting. In particular, we aim at implementing and analysing proximal schemes for solving (1.1) that exploit first-order optimality conditions. Our investigation is motivated by the fact that proximal methods may have a computational performance that is comparable to that of semismooth Newton methods. However, in contrast to the latter, proximal schemes do not require the con- struction of second-order derivatives and the implementation of, e.g., a Krylov solver.
For our investigation, we consider (1.1) with elliptic operators and linear and bilinear control mechanisms. Notice that the latter case has been a much less investigated problem. One of our main contributions is to prove convergence for all variants of the proximal schemes that we discuss in this paper. In particular, we prove an  convergence rate of the value of reduced cost functional, where k is the number of proximal iterations. This notion of convergence is used in l1-based optimization and in some application fields [14] .
convergence rate of the value of reduced cost functional, where k is the number of proximal iterations. This notion of convergence is used in l1-based optimization and in some application fields [14] .
We remark that many arguments in our analysis are similar to those presented in the finite-dimensional case. However, some additional arguments are necessary in infinite dimensions, especially regarding the structure of our differential constraints and the discussion of our inexact proximal schemes. We refer to [13] for further results concerning the formulation of proximal schemes for infinite-dimensional optimization problems from a different perspective.
In the next section, we discuss linear and bilinear elliptic optimal control problems, where for completeness, some conditions for the existence of a unique control-to-state operators are considered. Section 3 is devoted to optimal control problems with sparsity costs and governed by elliptic equations with linear and bilinear control mechanisms. We discuss conditions for convexity of the bilinear problem and state the optimality conditions. In Section 4, we present a Fast Inexact Proximal method (FIP) that represents an infinite-dimensional extension of the FISTA method. In Section 5, the convergence rate of this method is proven to be . In Section 6, an inexact semismooth Newton method in function spaces is presented as the state of the art method for comparison purposes. For completeness, the theory of this method is extended to the case of elliptic bilinear control pro- blems. A numerical comparison of the FIP and Semismooth-Newton methods is presented in Section 7. A section of conclusion completes this work.
. In Section 6, an inexact semismooth Newton method in function spaces is presented as the state of the art method for comparison purposes. For completeness, the theory of this method is extended to the case of elliptic bilinear control pro- blems. A numerical comparison of the FIP and Semismooth-Newton methods is presented in Section 7. A section of conclusion completes this work.
2. Elliptic Models with Linear and Bilinear Control Mechanisms
Consider the following boundary value problem
 (2.1)
(2.1)
 (2.2)
(2.2)
where , with
, with , is a bounded domain and
, is a bounded domain and . The operator
. The operator ![]() represents a second-order linear elliptic differential operator of the following form
represents a second-order linear elliptic differential operator of the following form
![]()
such that![]() , and
, and ![]() satisfies the coercivity condition
satisfies the coercivity condition ![]() a.e. in
a.e. in ![]()
for some ![]() and
and![]() . For the existence and uniqueness of solutions to (2.1) see ( [15] , Section 6).
. For the existence and uniqueness of solutions to (2.1) see ( [15] , Section 6).
Further, we consider the following bilinear elliptic control problem
![]() (2.3)
(2.3)
![]() (2.4)
(2.4)
In both linear and bilinear control settings, we require![]() , with the following set of feasible controls
, with the following set of feasible controls
![]() (2.5)
(2.5)
where![]() ,
,![]() .
.
Now, we discuss the existence of a unique weak solution to (2.3)-(2.4). For this purpose, we need the Poincaré-Friedrichs lemma and denote with ![]() the Poincaré-Friedrichs constant; see, e.g., [15] .
the Poincaré-Friedrichs constant; see, e.g., [15] .
We denote ![]() induced by the inner product
induced by the inner product![]() .
.
Theorem 2.1. Let![]() , where
, where
![]() (2.6)
(2.6)
Then, there exists a unique weak solution ![]() to the bilinear elliptic problem (2.3)-(2.4) and the following property holds
to the bilinear elliptic problem (2.3)-(2.4) and the following property holds
![]() (2.7)
(2.7)
Proof. The proof is immediate using the Lemma of Lax-Milgram and the following result
![]()
With![]() , we have that
, we have that ![]() and therefore
and therefore![]() . In the forth
. In the forth
line the Poincaré-Friedrichs was used. Hence,![]() . □
. □
Remark 2.1. In the case of![]() ,
, ![]() , and
, and![]() , including homogeneous Dirichlet boundary conditions, we have
, including homogeneous Dirichlet boundary conditions, we have![]() ,
, ![]() and
and ![]() such that we can ensure invertibility for
such that we can ensure invertibility for![]() .
.
Remark 2.2. In order to ensure a unique solution, we require condition (2.6) for the choice of ![]() in the bilinear case.
in the bilinear case.
Next, we recall the following theorem stating higher regularity of solutions to (2.3)-(2.4); see ( [18] , Theorem 4.3.1.4).
Theorem 2.2. Let![]() ,
, ![]() , be a convex and bounded polygonal or polyhedral domain. If in addition to the assumptions of Theorem 2.1, we have that
, be a convex and bounded polygonal or polyhedral domain. If in addition to the assumptions of Theorem 2.1, we have that![]() , then
, then ![]() and the following holds
and the following holds
![]() (2.8)
(2.8)
for some appropriate constants ![]() that only depend on
that only depend on![]() .
.
Remark 2.3. Because ![]() can be embedded in
can be embedded in ![]() for
for ![]() [19] and using (2.8), we obtain
[19] and using (2.8), we obtain
![]() (2.9)
(2.9)
Theorem 2.1 and Theorem 2.2 ensure the existence of a unique control-to-state operator
![]() (2.10)
(2.10)
where in the linear case ![]() represents the unique solution to (2.1) and in the bilinear case
represents the unique solution to (2.1) and in the bilinear case ![]() is the unique solution to (2.3). In the following, we use the expression
is the unique solution to (2.3). In the following, we use the expression ![]() when it is valid for both the linear and the bilinear systems.
when it is valid for both the linear and the bilinear systems.
Remark 2.4. The control-to-state operator ![]() is not Fréchet-differentiable in the
is not Fréchet-differentiable in the ![]() topology since for every
topology since for every ![]() there is always an
there is always an ![]() with
with ![]() such that
such that ![]() and therefore it is not neces- sarily defined. However, we only need the following weaker form of differentiability, which is a directional dif- ferentiability in all
and therefore it is not neces- sarily defined. However, we only need the following weaker form of differentiability, which is a directional dif- ferentiability in all ![]() in the directions
in the directions ![]() for
for![]() . This is called Q-differentiability; see [16] .
. This is called Q-differentiability; see [16] .
Definition 2.1. (Q-differentiability). Let ![]() be a convex set and
be a convex set and![]() . Then T is called Q-differentiable in
. Then T is called Q-differentiable in![]() , if there exists a mapping
, if there exists a mapping![]() , such that for all
, such that for all ![]() the following holds
the following holds
![]()
In the following, we omit the index U and write![]() .
.
The Q-derivatives of ![]() have the following properties.
have the following properties.
Lemma 2.3. The control-to-state-operator ![]() is at least two times Q-differentiable in
is at least two times Q-differentiable in ![]() with
with ![]() and its derivatives have the following properties for all directions
and its derivatives have the following properties for all directions![]() :
:
i) ![]() is the solution
is the solution ![]() of
of
![]() (2.11)
(2.11)
ii) ![]() is the solution
is the solution ![]() of
of
![]() (2.12)
(2.12)
iii) The following inequalities hold
![]() (2.13)
(2.13)
![]() (2.14)
(2.14)
Proof. Part (i) and (ii) can be shown by direct calculation (see ( [16] , Lemma 2.9). So part (iii) is left to be proved. If ![]() is a solution to
is a solution to
![]()
for ![]() and
and![]() , by using (2.9), we obtain
, by using (2.9), we obtain
![]() (2.15)
(2.15)
where the constants depend on the measure of ![]() and not on y. Therefore we obtain (2.13) and
and not on y. Therefore we obtain (2.13) and![]() . conclude Furthermore, let
. conclude Furthermore, let ![]() be a solution to the following problem
be a solution to the following problem
![]()
for ![]() and
and![]() . With the same arguments as above and using (2.15), we obtain
. With the same arguments as above and using (2.15), we obtain
![]()
Therefore, we obtain (2.14), which completes the proof. □
3. Elliptic Optimal Control Problems with Sparsity Cost Functional
In this section, we discuss optimal control problems governed by the linear- and bilinear-control elliptic systems discussed in the previous section. We consider the following cost functional
![]() (3.1)
(3.1)
where![]() ,
, ![]() ,
, ![]() and
and![]() . This functional is made of a Fréchet-differentiable classical tracking type cost with
. This functional is made of a Fréchet-differentiable classical tracking type cost with ![]() -regularization and a nondifferentiable
-regularization and a nondifferentiable ![]() -control cost. Using the control- to-state operator (2.10), we have the following reduced optimal control problem
-control cost. Using the control- to-state operator (2.10), we have the following reduced optimal control problem
![]() (3.2)
(3.2)
The nondifferentiable part ![]() is convex. Therefore, in order to state convexity of the reduced
is convex. Therefore, in order to state convexity of the reduced
functional![]() , we investigate the second-derivative of the differentiable part
, we investigate the second-derivative of the differentiable part![]() .
.
We have
![]()
In particular, in the linear case, we have
![]() (3.3)
(3.3)
We conclude that the reduced functional is strictly convex in the linear case.
In the bilinear case, we have a non-convex optimization problem. However, local convexity can be guar- anteed under some conditions. To be specific, we chose the sufficient condition stated in the following theorem.
Lemma 3.1. Let![]() , if the following inequality holds
, if the following inequality holds
![]() (3.4)
(3.4)
then the reduced functional ![]() is strictly convex in a neighborhood of
is strictly convex in a neighborhood of![]() .
.
Proof. Since ![]() is convex, we have to prove that
is convex, we have to prove that ![]() is strictly
is strictly
convex in u. Therefore we show that the reduced Hessian is positive definite in ![]() as follows
as follows
![]()
and thus ![]() is strictly convex in u. □
is strictly convex in u. □
We remark that the result of Lemma 3.1 is well known. It expresses local convexity of the reduced objective when the state function is sufficiently close to the target and the weight of the quadratic ![]() cost of the control is sufficiently large. Indeed, local convexity may result with much weaker assumptions. However, since our focus is the investigation of proximal schemes, we make the following strong assumption.
cost of the control is sufficiently large. Indeed, local convexity may result with much weaker assumptions. However, since our focus is the investigation of proximal schemes, we make the following strong assumption.
Assumption 1. We assume that (3.4) holds for all![]() .
.
Because of Lemma 2.3, this assumption holds if the regularization parameter![]() .
.
In the next step, the first-order optimality conditions for (3.2) are derived. First, we need the definition of the subdifferential.
Definition 3.1. Let H be a Hilbert space and ![]() be convex. We call the set-valued mapping
be convex. We call the set-valued mapping ![]() given by
given by
![]()
the subdifferential of F in u.
From ( [20] , Remark 3.2), we obtain that ![]() is a solution of (3.2), if and only if there exists a
is a solution of (3.2), if and only if there exists a ![]() such that
such that
![]() (3.5)
(3.5)
where ![]() denotes the adjoint operator. From (3.5), one can derive the optimality system by using the Lagrange multipliers
denotes the adjoint operator. From (3.5), one can derive the optimality system by using the Lagrange multipliers![]() . We have the following theorem (see [4] , Theorem 2.1).
. We have the following theorem (see [4] , Theorem 2.1).
Theorem 3.2. The optimal solution ![]() of (3.2) is characterized by the existence of
of (3.2) is characterized by the existence of ![]() such that
such that
![]() (3.6)
(3.6)
![]() (3.7)
(3.7)
![]() (3.8)
(3.8)
![]() (3.9)
(3.9)
![]() (3.10)
(3.10)
![]() (3.11)
(3.11)
If one introduces the parameter![]() , it is shown in [4] that conditions (3.7)-(3.11) are equivalent to
, it is shown in [4] that conditions (3.7)-(3.11) are equivalent to
![]() (3.12)
(3.12)
where
![]()
where ![]() is arbitrary. With this setting, the optimality system (3.6)-(3.11) reduces to the following
is arbitrary. With this setting, the optimality system (3.6)-(3.11) reduces to the following
![]() (3.13)
(3.13)
![]() (3.14)
(3.14)
In the linear-control case, the Equation (3.13) becomes the following
![]() (3.15)
(3.15)
where![]() . By setting
. By setting ![]() and
and![]() , (3.15) becomes
, (3.15) becomes![]() .
.
We summarize the previous considerations into the following theorem.
Theorem 3.3. (Linear optimality conditions) The optimal solution ![]() to (3.2) in the linear control case is characterized by the existence of the dual pair
to (3.2) in the linear control case is characterized by the existence of the dual pair ![]() such that
such that
![]() (3.16)
(3.16)
![]() (3.17)
(3.17)
![]() (3.18)
(3.18)
![]() (3.19)
(3.19)
Furthermore, the reduced gradient and the reduced Hessian of ![]() are given by
are given by
![]() (3.20)
(3.20)
Notice that with an abuse of notation, we denote the reduced Hessian with![]() , which is also used to denote the second derivative operator.
, which is also used to denote the second derivative operator.
For the bilinear-control system, we have ![]() and therefore
and therefore
![]() such that (3.13) becomes the following
such that (3.13) becomes the following
![]() (3.21)
(3.21)
By setting ![]() and
and ![]() this can be written as follows,
this can be written as follows,![]() .
.
We summarize the previous considerations into the following theorem.
Theorem 3.4. (Bilinear optimality system) The optimal solution ![]() to (3.2) in the bilinear control case is characterized by the existence of the dual pair
to (3.2) in the bilinear control case is characterized by the existence of the dual pair ![]() such that
such that
![]() (3.22)
(3.22)
Furthermore, the explicit reduced gradient and the reduced Hessian of ![]() are given by
are given by
![]() (3.23)
(3.23)
and
![]()
4. Proximal Methods for Elliptic Control Problems
In this section, we discuss first-order proximal methods to solve our linear and bilinear optimal control problems. The starting point to discuss proximal methods consists of identifying a smooth and a nonsmooth part in the reduced objective![]() . That is, we consider the following optimization problem
. That is, we consider the following optimization problem
![]() (4.1)
(4.1)
where, we assume
![]() (4.2)
(4.2)
![]() (4.3)
(4.3)
![]() (4.4)
(4.4)
where![]() . Notice that our optimal control problem (3.2) has this additive structure where (4.2) holds for
. Notice that our optimal control problem (3.2) has this additive structure where (4.2) holds for
![]() and
and ![]() is at least two times Q-differentiable, it is convex under
is at least two times Q-differentiable, it is convex under
appropriate conditions discussed in the previous section, and it has Lipschitz-continuous gradient that we prove in the following lemma.
Lemma 4.1. The functional ![]() has a Lipschitz-continuous gradient for
has a Lipschitz-continuous gradient for
![]() (linear-control case) and for
(linear-control case) and for ![]() (bilinear-control case).
(bilinear-control case).
Proof. For the linear-control case, we have
![]()
such that we have the Lipschitz-constant![]() .
.
For the bilinear-control case, we use the mean value theorem. There exists a ![]() such that
such that
![]()
for the last inequality, we use (2.7), (2.13), (2.14), which completes the proof. □
The following lemma is essential in the formulation of proximal methods.
Lemma 4.2. Let ![]() be Q-differentiable with respect to
be Q-differentiable with respect to![]() , and it has a Lipschitz continuous gradient with Lipschitz constant
, and it has a Lipschitz continuous gradient with Lipschitz constant![]() . Then for all
. Then for all![]() , the following holds
, the following holds
![]() (4.5)
(4.5)
Proof.
![]()
□
Notice that ![]() represents the smallest value of L such that (4.5) is satisfied. We remark that the discussion that follows is valid for
represents the smallest value of L such that (4.5) is satisfied. We remark that the discussion that follows is valid for ![]() as in Lemma 4.5. However, as we discuss below, the efficiency of our proximal schemes depends on how close is the chosen L to the minimal and optimal value
as in Lemma 4.5. However, as we discuss below, the efficiency of our proximal schemes depends on how close is the chosen L to the minimal and optimal value![]() . Now, since this value is usually not available analytically, we discuss and implement below some numerical strategies for determining a sufficiently accurate approximation of
. Now, since this value is usually not available analytically, we discuss and implement below some numerical strategies for determining a sufficiently accurate approximation of![]() . In particular, we consider a power iteration [21] , and the backtracking approach discussed in Remark 5.1.
. In particular, we consider a power iteration [21] , and the backtracking approach discussed in Remark 5.1.
Further, notice that also in the case of choosing![]() , our proximal scheme still converges with rate
, our proximal scheme still converges with rate ![]() (resp.
(resp.![]() ) times a convergence constant. However, this convergence constant grows considerably as L becomes larger and therefore the convergence of the proximal method appears recognizably slower. On the other hand, if L is chosen smaller than the Lipschitz constant, then convergence cannot be guaranteed.
) times a convergence constant. However, this convergence constant grows considerably as L becomes larger and therefore the convergence of the proximal method appears recognizably slower. On the other hand, if L is chosen smaller than the Lipschitz constant, then convergence cannot be guaranteed.
The strategy of the proximal scheme is to minimize an upper bound of the objective functional at each iteration, instead of minimizing the functional directly. Lemma 4.2 gives us the following upper bound for all![]() . We have
. We have
![]()
where, we have equality if![]() . Furthermore, we have the following equation
. Furthermore, we have the following equation
![]() (4.6)
(4.6)
Now, consider (4.6) and recall that![]() . We have the following lemma.
. We have the following lemma.
Lemma 4.3. The following equation holds
![]()
where the projected soft thresholding function is defined as follows
![]()
Proof. There exists a![]() , the subdifferential of
, the subdifferential of ![]() such that the solution
such that the solution
![]() fulfills the following variational inequality; see, e.g., ( [20] , Remark 3.2);
fulfills the following variational inequality; see, e.g., ( [20] , Remark 3.2);
![]() (4.7)
(4.7)
Now, we show that ![]() fulfills (4.7). The following investigation of the different cases is meant to be pointwise. We have
fulfills (4.7). The following investigation of the different cases is meant to be pointwise. We have
・ ![]() :
:
It follows that ![]() and therefore
and therefore ![]() such that
such that
![]() .
.
・ ![]() :
:
It follows that ![]() and
and ![]() such that
such that
![]() .
.
・ ![]() :
:
It follows that ![]() and
and ![]() such that
such that
![]() .
.
・ ![]() :
:
It follows that ![]() and therefore
and therefore ![]() such that
such that
![]()
・ ![]() :
:
It follows that ![]() and therefore
and therefore ![]() such that
such that
![]() .
.
□
Based on this lemma, we conclude that the solution to (4.6) is given by
![]()
thus obtaining an approximation to the optimal u sought. Therefore we can use this result to define an iterative scheme as follows
![]()
starting from a given![]() . The resulting algorithm implements a proximal scheme as follows
. The resulting algorithm implements a proximal scheme as follows
This scheme is discussed in [9] [12] for the case of finite-dimensional optimization problems. Notice that the iterated thresholding scheme discussed in [9] coincides with Algorithm 1 for the special case![]() . The con- vergence results for Algorithm 1 presented in [12] can be extended to our elliptic control problems, using the theoretical results presented above. Therefore we can state the following theorem.
. The con- vergence results for Algorithm 1 presented in [12] can be extended to our elliptic control problems, using the theoretical results presented above. Therefore we can state the following theorem.
Theorem 4.4. Let ![]() be a sequence generated by Algorithm 1 and
be a sequence generated by Algorithm 1 and ![]() be the solution to (3.2) with linear- or bilinear-control elliptic equality constraints. Then, for every
be the solution to (3.2) with linear- or bilinear-control elliptic equality constraints. Then, for every ![]() the following holds
the following holds
![]()
In [22] , an acceleration strategy for proximal methods applied to convex optimization problems fulfilling (4.4) is formulated, which improves the rate of convergence of these schemes from ![]() to
to![]() . Speci- fically, one defines the sequence
. Speci- fically, one defines the sequence ![]() with
with
![]() (4.8)
(4.8)
and
![]() (4.9)
(4.9)
Correspondingly, the optimization variable ![]() is updated by the following
is updated by the following
![]()
This procedures is summarized in the following algorithm
The following convergence result represents an extension of ( [12] , Theorem 4.4). We have
Theorem 4.5. Let ![]() be a sequence generated by Algorithm 2 and
be a sequence generated by Algorithm 2 and ![]() be the solution of (3.2) with linear- or bilinear-control elliptic equality constraints. Then, for every
be the solution of (3.2) with linear- or bilinear-control elliptic equality constraints. Then, for every ![]() the following holds
the following holds
![]()
Algorithm 1 and Algorithm 2 require the calculation of
![]()
![]()
However, the exact inversion of a discretized elliptic differential operator A may become too expensive. Therefore one has to use iterative methods; e.g., the conjugate gradient method [23] . For this reason, we discuss an inexact version of the proximal scheme, where the equality constraints and the corresponding adjoint equa- tions are solved up to a given tolerance quantified by![]() . In the following, we denote with
. In the following, we denote with ![]() the inexact gradient that corresponds to an inexact inversion of the equation
the inexact gradient that corresponds to an inexact inversion of the equation![]() , resp.
, resp.![]() , that results in an approximated state variable
, that results in an approximated state variable![]() , resp.
, resp.![]() , in the following sense
, in the following sense
![]()
Hence, there exists an ![]() with
with ![]() such that
such that
![]() (4.10)
(4.10)
We denote the inexact inversion method for the problem![]() , with an error
, with an error![]() , with
, with![]() . With this notation, the inexact gradient computation is illustrated in Algorithm 3.
. With this notation, the inexact gradient computation is illustrated in Algorithm 3.
With this preparation, we formulate our inexact proximal (IP) scheme with Algorithm 4.
We also formulate the accelerated (fast) version of our IP scheme in Algorithm 5. We refer to it as the FIP method.
5. Convergence Analysis of Inexact Proximal Methods
In this section, we investigate the convergence of our IP and FIP schemes. Notice that our analysis differs from that presented in [12] where finite-dimensional problems and exact inversion are considered. We start investigat- ing the error of the inexact gradient![]() .
.
Lemma 5.1. The following estimate holds
![]()
for some c > 0.
Proof. In the linear case, we have![]() . Using (4.10) there exist the errors
. Using (4.10) there exist the errors
![]() with
with ![]() such that
such that
![]() (5.1)
(5.1)
where
![]() (5.2)
(5.2)
In the bilinear case, we have![]() . Furthermore, Theorem
. Furthermore, Theorem
2.1 implies that the solution ![]() of the equation
of the equation ![]() has the following property
has the following property
![]() (5.3)
(5.3)
We also have![]() .
.
Using (4.10) there exist the errors ![]() with
with ![]() such that
such that
![]()
where
![]() (5.4)
(5.4)
For the three last inequalities, we use (5.3), (2.7), and![]() . □
. □
We refer to the estimation error of the inexact gradient in step k as follows
![]()
Now, we define
![]()
![]()
and
![]() (5.5)
(5.5)
such that one step of Algorithm 4, resp. Algorithm 5, can be written as follows
![]()
In order to prove the convergence of the IP method, we need the following two lemmas.
Lemma 5.2. For any![]() , one has
, one has ![]() iff there exists
iff there exists![]() , the subdifferential of
, the subdifferential of![]() , such that
, such that
![]() (5.6)
(5.6)
Proof. This is immediate from the variational inequality of (5.5). For a proof see, e.g., [20] . □
Lemma 5.3. Let ![]() and
and![]() , then for any
, then for any![]() , we have
, we have
![]()
Proof. From (4.5), we have
![]()
and therefore
![]() (5.7)
(5.7)
Now since ![]() and
and ![]() are convex, we have
are convex, we have
![]()
Summing the above inequalities gives
![]() (5.8)
(5.8)
so using (5.6), (5.8), and the definition of ![]() in (5.7) gives the following
in (5.7) gives the following
![]()
□
Now, we prove a ![]() convergence rate for Algorithm 4 (IP scheme).
convergence rate for Algorithm 4 (IP scheme).
Theorem 5.4. Let ![]() be the sequence generated by Algorithm 4 and
be the sequence generated by Algorithm 4 and ![]() be the solution of (3.2) with linear or bilinear elliptic equality constraints; let c be determined by (5.2) resp. (5.4). Then for any
be the solution of (3.2) with linear or bilinear elliptic equality constraints; let c be determined by (5.2) resp. (5.4). Then for any![]() , we have
, we have
![]() (5.9)
(5.9)
Proof. Using Lemma 5.3 with![]() ,
, ![]() and
and ![]() we obtain
we obtain
![]()
Summing this inequality over ![]() gives
gives
![]() (5.10)
(5.10)
Using again Lemma 5.3 with![]() , we obtain
, we obtain
![]()
Multiplying this inequality by n and summing again over ![]() gives
gives
![]()
which simplifies to the following
![]() (5.11)
(5.11)
Adding (5.10) and (5.11) together, we get
![]()
and hence with ![]() and
and![]() , it follows that
, it follows that
![]()
□
Next, we present a convergence result for the FIP method. For this purpose, we need the following lemma.
Lemma 5.5. Let![]() ,
, ![]() and
and ![]() be the sequences generated by Algorithm 5, let
be the sequences generated by Algorithm 5, let ![]() be the error of the inexact gradient, and let
be the error of the inexact gradient, and let ![]() be the solution to (3.2), then for any
be the solution to (3.2), then for any![]() , we have
, we have
![]()
with![]() ,
,![]() .
.
Proof. We apply Lemma 4.2 at the points ![]() and likewise at the points
and likewise at the points![]() . We obtain the following
. We obtain the following
![]()
where we used the fact that![]() . Now, we multiply the first inequality above by
. Now, we multiply the first inequality above by ![]() and add it to the second inequality to obtain the following
and add it to the second inequality to obtain the following
![]()
Multiplying this inequality by ![]() and using
and using![]() , which holds due to (4.8), we obtain
, which holds due to (4.8), we obtain
![]()
Applying the Pythagoras relation![]() , to the right-hand side of the last inequality with
, to the right-hand side of the last inequality with![]() , we obtain
, we obtain
![]()
Therefore, with ![]() (see (4.9)) and
(see (4.9)) and ![]() defined as
defined as
![]()
it follows that
![]()
□
We also have the following lemmas.
Lemma 5.6. The positive sequence ![]() generated by the FIP scheme via (4.8) with
generated by the FIP scheme via (4.8) with ![]() satisfies
satisfies ![]() for all
for all![]() .
.
Proof. The proof is immediate by mathematical induction. □
Lemma 5.7. Let ![]() and
and ![]() be positive sequences of reals and
be positive sequences of reals and ![]() be a sequence of reals satisfying
be a sequence of reals satisfying
![]()
Then,![]() .
.
Proof. The proof is immediate by mathematical induction. □
Now, we can prove a convergence rate of ![]() for Algorithm 5 (FIP scheme).
for Algorithm 5 (FIP scheme).
Theorem 5.8. Let ![]() be the sequence generated by Algorithm 5, let
be the sequence generated by Algorithm 5, let ![]() be the solution to (3.2) with linear or bilinear elliptic equality constraints; let c be determined by (5.2) resp. (5.4). Then for any
be the solution to (3.2) with linear or bilinear elliptic equality constraints; let c be determined by (5.2) resp. (5.4). Then for any![]() , the following holds
, the following holds
![]() (5.12)
(5.12)
Proof. Let us define the quantities
![]()
As in Lemma 5.5, we define![]() . Then, by Lemma 5.5, the following holds for every
. Then, by Lemma 5.5, the following holds for every ![]()
![]()
and hence assuming that ![]() holds true, invoking Lemma 5.7, we obtain
holds true, invoking Lemma 5.7, we obtain
![]()
which combined with ![]() (Lemma 5.6) gives the following
(Lemma 5.6) gives the following
![]() (5.13)
(5.13)
Furthermore with Lemma 5.6 and![]() , we have that
, we have that
![]()
which combined with (5.13) and ![]() gives the following
gives the following
![]()
What remains to be proved is the validity of the relation![]() . Since
. Since![]() , we have
, we have
![]()
Applying Lemma 4.2 to the points ![]() and
and![]() , we get
, we get
![]()
that is ![]() holds true. □
holds true. □
Remark 5.1. The IP and FIP methods converge also replacing L with an upper bound of it. In particular, we can prove ![]() convergence of the FIP method using a backtracking stepsize rule for the Lipschitz constant (Step 1 in Algorithm 5) as in [12] .
convergence of the FIP method using a backtracking stepsize rule for the Lipschitz constant (Step 1 in Algorithm 5) as in [12] .
We complete this section formulating a fast inexact proximal scheme where the Lipschitz constant L is obtained by forward tracking, (nevertheless we call it backtracking as in [12] ), thus avoiding any need to compute the reduced Hessian. Our fast inexact proximal backtracking (FIPB) method is presented in Algorithm 6.
6. The Inexact Semismooth Newton Method
We consider the semismooth Newton method as a benchmark scheme for solving elliptic non-smooth optimal control problems; see, e.g., [4] - [6] . This method is proven to be equivalent to the primal-dual active set method in [24] . The inexact semismooth Newton (ISSN) method is presented in [25] for finite-dimensional problems. In this section, we discuss the ISSN method for infinite-dimensional optimization problems and use it for compari- son with our inexact proximal schemes. To support our use of the ISSN scheme to solve bilinear control pro- blems, we extend two theoretical results in [3] [4] . For the analysis that follows, we need the following defini- tion.
Definition 6.1. Let X and Y be Banach spaces, ![]() be open and
be open and ![]() be a nonlinear mapping. We say that
be a nonlinear mapping. We say that ![]() is generalized differentiable in an open subset
is generalized differentiable in an open subset ![]() if there exists a set-valued mapping
if there exists a set-valued mapping ![]() with
with ![]() for all
for all ![]() such that
such that
![]() (6.1)
(6.1)
for every ![]() and for every
and for every![]() . We call
. We call ![]() the generalized differential and every
the generalized differential and every ![]() a generalized derivative.
a generalized derivative.
This definition is similar to the semismoothness stated in [3] and also known under the name “slant differentiability”; see, e.g., [24] . Now, we discuss the solution of the following nonlinear equation![]() . We have the following theorem.
. We have the following theorem.
Theorem 6.1. ( [24] , Theorem 1.1) Suppose that ![]() is a solution to
is a solution to ![]() and that
and that ![]() is generalized differentiable in an open neighborhood U containing
is generalized differentiable in an open neighborhood U containing ![]() with a generalized derivative
with a generalized derivative![]() . If
. If ![]() is
is
invertible for all ![]() and
and ![]() is bounded, then the semismooth Newton (SSN) iteration
is bounded, then the semismooth Newton (SSN) iteration
![]()
converges superlinearly to![]() , provided that
, provided that ![]() is sufficiently small.
is sufficiently small.
An inexact version of the SSN scheme discussed in this theorem is formulated in ( [3] , Algorithm 3.19), where the update ![]() to
to ![]() is obtained as follows. Choose a boundedly invertible operator
is obtained as follows. Choose a boundedly invertible operator ![]() and com- pute
and com- pute![]() . For this scheme, superlinear convergence is proven in ( [3] , Theorem 3.20), provided that there exists a
. For this scheme, superlinear convergence is proven in ( [3] , Theorem 3.20), provided that there exists a ![]() such that
such that
![]()
However, this procedure is difficult to realize in practice. For this reason, in our ISSN scheme, the “exact”
update step ![]() with
with![]() , as discussed in [24] , is replaced by
, as discussed in [24] , is replaced by ![]()
with ![]() satisfying the following inequality
satisfying the following inequality
![]() (6.2)
(6.2)
Our ISSN scheme is given in Algorithm 7.
On the basis of the proof of Theorem 3.20 in [3] , we prove the following theorem that states convergence of Algorithm 7. We have
Theorem 6.2. Suppose that ![]() is a solution to
is a solution to ![]() and that
and that ![]() is generalized differentiable and Lipschitz continuous in an open neighborhood U containing
is generalized differentiable and Lipschitz continuous in an open neighborhood U containing ![]() with a generalized derivative
with a generalized derivative![]() . If
. If ![]() is
is
invertible for all ![]() and
and ![]() is bounded, then Algorithm 7 converges superlinearly to
is bounded, then Algorithm 7 converges superlinearly to![]() , provided that
, provided that ![]() is sufficiently small.
is sufficiently small.
Proof. Let ![]() and
and![]() . Furthermore, let
. Furthermore, let ![]() be so small that
be so small that ![]() and
and ![]() is Lipschitz continuous in
is Lipschitz continuous in ![]() with
with![]() . Now, we show inductively that
. Now, we show inductively that ![]() for all k. So we assume that
for all k. So we assume that ![]() for some
for some![]() . Then there holds
. Then there holds
![]() . We estimate the Y-norm of
. We estimate the Y-norm of ![]() as
as
![]() (6.4)
(6.4)
Next, using![]() , we obtain
, we obtain
![]() (6.5)
(6.5)
This result, the generalized differentiability of ![]() at
at![]() , and (6.4) give the following
, and (6.4) give the following
![]() (6.6)
(6.6)
Hence, for sufficiently small![]() , we have
, we have![]() , with
, with
![]() , and thus
, and thus
![]()
This gives![]() , which inductively proves that
, which inductively proves that ![]() in Y. We con-
in Y. We con-
clude from (6.6) the following![]() , which completes the proof. □
, which completes the proof. □
Our purpose is to solve the nonlinear and nonsmooth equation system (3.13)-(3.14) by the semismooth Newton iteration. We introduce the operator
![]()
where ![]() is the Sobolev embedding (see [4] and [19] , Theorem 5.4]) of
is the Sobolev embedding (see [4] and [19] , Theorem 5.4]) of ![]() into
into ![]() with
with![]() . This embedding is necessary to show that the function
. This embedding is necessary to show that the function ![]() defined in (6.7) is generalized differentiable. Now, by using
defined in (6.7) is generalized differentiable. Now, by using ![]() from (3.13) and choosing
from (3.13) and choosing![]() , Equation (3.14) becomes
, Equation (3.14) becomes![]() , where
, where
![]() (6.7)
(6.7)
The function ![]() is generalized differentiable (see [4] , Theorem 4.2 for the linear case, analogue for the bilinear case) and a generalized derivative is given by
is generalized differentiable (see [4] , Theorem 4.2 for the linear case, analogue for the bilinear case) and a generalized derivative is given by
![]() (6.8)
(6.8)
where ![]() and
and![]() .
.
Using Theorem 6.2, the following theorem guarantees the superlinear convergence of the semismooth Newton method applied to our problems. To prove this we extend the proof of Theorem 4.3 in [4] .
Theorem 6.3. If (3.4) is fulfilled, then ![]() is invertible for all
is invertible for all ![]() and
and ![]() is
is
bounded.
Proof. The linear-control case is investigated in [4] , so we focus on the bilinear case. Define![]() , and for
, and for ![]() and
and ![]() the restriction operator
the restriction operator ![]() by
by![]() . The corre- sponding adjoint operator is the extension-by-zero operator
. The corre- sponding adjoint operator is the extension-by-zero operator![]() . We assume that
. We assume that![]() . From (6.8) we obtain that
. From (6.8) we obtain that![]() . Thus,
. Thus, ![]() satisfies
satisfies
![]() (6.9)
(6.9)
Now, we define ![]() and
and
![]()
for![]() . We use
. We use
![]()
to see that (6.9) is equivalent to![]() .
.
Using ![]() and (3.4) we have coercivity of a for
and (3.4) we have coercivity of a for ![]() and therefore the
and therefore the
Lax-Milgram-Lemma can be applied to show that (6.9) admits a unique solution![]() . Moreover, this
. Moreover, this
solution satisfies![]() , with a constant C independent of u. For the last inequality,
, with a constant C independent of u. For the last inequality,
we use the fact that ![]() is bounded due to the boundedness of
is bounded due to the boundedness of![]() ,
, ![]() and
and ![]() as shown in (2.7), (2.13), and (2.14). □
as shown in (2.7), (2.13), and (2.14). □
7. Numerical Experiments
In this section, we present results of numerical experiments to validate the computational performance of our inexact proximal methods and to demonstrate the convergence rate of ![]() proved in Theorem 5.8. In the following procedures, for validation purposes, we formulate control problems for which we know the exact solution. We have
proved in Theorem 5.8. In the following procedures, for validation purposes, we formulate control problems for which we know the exact solution. We have
Procedure 1. (Linear case)
1) Choose ![]() and
and ![]() arbitrary.
arbitrary.
2) Set ![]()
3) Set![]() ,
, ![]() , and
, and![]() .
.
Lemma 7.1. Procedure 1 provides a solution ![]() of the optimal control problem (3.2) with linear-control elliptic equality constraints.
of the optimal control problem (3.2) with linear-control elliptic equality constraints.
Proof. We show that the optimality conditions (3.16)-(3.19) in Theorem 3.3 are fulfilled. (3.16)-(3.18) are obviously fulfilled because of 3) in Procedure 1. Now, we consider different cases to show (3.19):
・ ![]() : From 2) we have
: From 2) we have ![]() and from 3)
and from 3) ![]() and therefore
and therefore
![]()
・ ![]() :
:
*![]() : From 2) we have
: From 2) we have ![]() and from 3) we have
and from 3) we have![]() , therefore
, therefore
![]()
*![]() : From 2) we have
: From 2) we have ![]() and from 3) we have
and from 3) we have![]() , therefore
, therefore
![]()
・ ![]()
*![]() : From 2) we have
: From 2) we have ![]() and from 3) we have
and from 3) we have![]() . So
. So
![]()
*![]() : From 2) we have
: From 2) we have ![]() and from 3) we have
and from 3) we have![]() , therefore
, therefore
![]()
□
Procedure 2. (Bilinear case)
1) Choose ![]() and
and ![]() arbitrary.
arbitrary.
2) Set![]() .
.
3) Set![]() ,
, ![]() , and
, and![]() .
.
Lemma 7.2. Procedure 2 provides a solution ![]() to the optimal control problem (3.2) with bilinear- control elliptic equality constraints.
to the optimal control problem (3.2) with bilinear- control elliptic equality constraints.
Proof. The proof is similar to the one of the linear case. □
Next, we specify the elliptic operator, the domain of computation, the choice of ![]() and
and![]() , and the optimi- zation and numerical parameters. We consider the following examples.
, and the optimi- zation and numerical parameters. We consider the following examples.
Case 1. (1 dimensional)![]() ,
, ![]() ,
, ![]() ,
, ![]() and
and![]() . We discretize
. We discretize
![]() with gridsize
with gridsize ![]()
![]() is discretized by second-order finite differences. Then we have
is discretized by second-order finite differences. Then we have![]() ,
,
![]() and
and ![]() such that (2.6) holds. The results are shown in Table 1.
such that (2.6) holds. The results are shown in Table 1.
Case 2. (2 dimensional)![]() ,
, ![]() ,
, ![]() ,
, ![]() and
and
![]() . We discretize
. We discretize ![]() with gridsize
with gridsize![]() . A is discretized by second-order finite
. A is discretized by second-order finite
differences. Then we have![]() ,
, ![]() and
and ![]() such that (2.6) holds. The results are shown in Table 2.
such that (2.6) holds. The results are shown in Table 2.
We compare the FIP, FIPB and ISSN schemes in terms of computational time. In the FIP method, we estimate an approximation to the Lipschitz constant ![]() with a power iteration. This power iteration is stopped if the difference between two iterates of the norm
with a power iteration. This power iteration is stopped if the difference between two iterates of the norm ![]() is less or equal than a tolerance of
is less or equal than a tolerance of![]() . For the FIPB method, we use backtracking with
. For the FIPB method, we use backtracking with ![]() and
and![]() . All algorithms are stopped if
. All algorithms are stopped if![]() . We can see in Table 1 and Table 2 that the computational performance of the FIP and FIPB methods is comparable to that of the ISSN method.
. We can see in Table 1 and Table 2 that the computational performance of the FIP and FIPB methods is comparable to that of the ISSN method.
![]()
Table 1. Example 1: Comparison of the FIP, FIPB and ISSN methods.
![]()
Table 2. Example 2: Comparison of the FIP, FIPB, and ISSN methods.
In order to validate the convergence rate of![]() , the theoretical upper bound of Theorem 5.20 and the actual error of the functional in correspondence to Example 1 and Example 2 with
, the theoretical upper bound of Theorem 5.20 and the actual error of the functional in correspondence to Example 1 and Example 2 with ![]() and
and![]() , are plotted in Figure 1. We see that the observed convergence may be faster than the theoretical prediction.
, are plotted in Figure 1. We see that the observed convergence may be faster than the theoretical prediction.
We conclude this section considering challenging linear- and a bilinear-control cases. However, the exact solutions are not known. In these cases, the target function is not attainable. We have
Case 3. (Linear case)![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() and
and![]() . We discretize
. We discretize ![]() with gridsize
with gridsize![]() . A is discretized by second-order finite differences.
. A is discretized by second-order finite differences.
Case 4. (Bilinear case)![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() and
and![]() . We discretize
. We discretize ![]() with gridsize
with gridsize![]() . A is discretized by second-order finite differences.
. A is discretized by second-order finite differences.
In Figure 2, we present the optimal controls obtained for the Examples 3 and 4, respectively. Notice that the controls obtained with the FIP, FIPB, and ISSN schemes are indistinguishable. We observe that in the case of a small ![]() there is an abrupt change between
there is an abrupt change between ![]() and
and![]() , whereas for bigger
, whereas for bigger ![]() the change is con- tinuous. We also see that by increasing
the change is con- tinuous. We also see that by increasing ![]() the support of u decreases, as expected. The different computational times of the FIP, FIPB, and ISSN schemes are also given in the figure. We see that the FIPB scheme may outperform the ISSN scheme and vice versa. We also have a case where the ISSN scheme has difficulty to converge; see Figure 2, test case (d). Notice that very similar results are also obtained using a globalized version [7] of the ISSN scheme. These results and further results of numerical experiments demonstrate that fast inexact proximal scheme represent an effective alternative to semi-smooth Newton methods.
the support of u decreases, as expected. The different computational times of the FIP, FIPB, and ISSN schemes are also given in the figure. We see that the FIPB scheme may outperform the ISSN scheme and vice versa. We also have a case where the ISSN scheme has difficulty to converge; see Figure 2, test case (d). Notice that very similar results are also obtained using a globalized version [7] of the ISSN scheme. These results and further results of numerical experiments demonstrate that fast inexact proximal scheme represent an effective alternative to semi-smooth Newton methods.
8. Conclusion
Inexact proximal schemes for solving linear- and bilinear elliptic optimal control problems were discussed. A complete analysis of these methods was presented and a convergence rate of ![]() was proven. For bench- marking purposes, the proposed inexact proximal schemes were compared to an inexact semismooth Newton method. Results of numerical experiments demonstrated the computational effectiveness of inexact proximal schemes and successfully validated the theoretical estimates.
was proven. For bench- marking purposes, the proposed inexact proximal schemes were compared to an inexact semismooth Newton method. Results of numerical experiments demonstrated the computational effectiveness of inexact proximal schemes and successfully validated the theoretical estimates.
![]()
Figure 2. Optimal controls u for the Case 3 (top) and Case 4 (bottom).
Acknowledgements
Supported in part by the Interdisziplinäres Zentrum für Klinische Forschung der Universität Würzburg (IZKF); Project F-254: Parallel Multigrid Imaging and Compressed Sensing for Dynamic 3D Magnetic Resonance Imaging. This publication was supported by the Open Access Publication Fund of the University of Würzburg.