Perturbation Analysis for the Matrix-Scaled Total Least Squares Problem ()
1. Introduction
Consider the overdetermined linear system
, where
and
, and the total least squares (TLS) problem can be formulated as (see [1] )
(1)
However, in many linear parameter estimation problems, the error of data matrix A on the left side of the approximate system may be scaled. In order to maximize the accuracy of the estimated parameters x, the case where the scaling factor is used to weight some columns of error matrix in data matrix A is naturally considered when estimating parameters x using the TLS approach. From the point of view, Liu, Wei and Chen [2] proposed the concept of the matrix-scaled total least squares (MSTLS) problem with single right-hand side in 2019. Inspired by [3], Liu, Wei and Chen [2] transformed the MSTLS problem with single right-hand side into the weighted TLS (WTLS) problem.
As a continuation of their work, we extend the MSTLS problem with single right-hand side to multiple right-hand sides as follows.
(2)
where
,
,
,
and
.
When
, our model (2) degenerates to the single right-hand case.
The condition number is a measure of the sensitivity of the solution to input data perturbation. Therefore, condition numbers play an important role in numerical analysis. Many scholars have studied the TLS problem with multiple right-hand sides: [4] [5] [6] [7] [8] studied the sufficient conditions or/and necessary conditions for its solvability. When the TLS problem is solvable, Huang, Yan and Yu discussed the solution set and minimal norm solution of the TLS problem, see [4] [9]. Recently, based on singular value decomposition (SVD) of augmented matrix, many scholars have discussed the solution set and minimal norm solution of the TLS problem. In [10], Hnětynková et al. proposed the TLS problem with multiple right-hand sides, and gave the conditions for the existence and expression of the solutions. In [11], Hnětynková et al. extended the concept of the core problem of the TLS problem with single right-hand side proposed by Paige and Strakoš in [12] to the TLS problem with multiple right-hand sides. The perturbation analysis of the solution of the TLS problem with multiple right-hand sides can be found in references [7] [8] [13] [14] [15]. Zheng, Meng and Wei gave the exact expressions and their upper bounds of normwise, mixed and componentwise condition numbers of TLS problem with multiple right-hand sides in [16] [17]. These results extend the condition number theory of TLS problem with single right-hand side. In addition, by making use of the perturbation results in the above references, Liu et al. [18] [19] derived closed formulae for condition numbers of the total least squares problem with linear equality constraint problem.
As far as we know, the perturbation analysis of the MSTLS problem has not been systematically performed in literature. In this paper, we consider the perturbation analysis of the MSTLS problem (2). The relative normwise condition number, the mixed condition number and the componentwise condition number are derived. Our analysis can be seen as a unified treatment of the mentioned approaches in [3] and [16].
Throughout this paper, for given positive integers m and n, we denote by
the space of all
real matrices, and
stands for the identity matrix of order n.
,
and
denote the 2-norm, ∞-norm, and Frobenius norm of their arguments, respectively. Given a matrix
,
,
,
and
denote the “max” norm given by
, the transpose, the Moore-Penrose inverse and the i-th largest singular value of X, respectively.
is the absolute value of the matrix X, whose entries are
. Moreover, for
,
,
is an entry-wise division; that is,
, or Y./Z in Matlab notation. Here, ξ/0 is interpreted as zero if
and
otherwise. For matrices
,
and
denotes the Kronecker product of A and any matrix B. Let
, where
has an entry 1 in position
and all other entries are zeros.
The organization of this paper is as follows. In Section 2, we present some necessary preliminaries, including the explicit expression for minimum
-norm MSTLS solution under some mild conditions and some important lemmas. In Section 3, we derive the normwise, mixed and componentwise condition numbers and their computable upper bounds of the MSTLS solution. All these results can reduce to those of the TLS problem which were given in [16]. Two numerical examples are tested in Section 4 to demonstrate the tightness of the derived upper bounds. Some concluding remarks are given in Section 5. In the appendix, we present a power method for calculating the normwise condition number of the MSTLS solution
similar to the one in [20].
2. Preliminaries
In this section, we give an explicit expression for the minimum
-norm solution of the MSTLS problem with multiple right-hand sides (2) under some mild conditions.
Along the similar lines as in [2] [3], we can see that (2) is equivalent to the following WTLS model:
(3)
where
. Let
and the SVD of
be
(4)
where
,
,
,
,
and
.
The following theorem gives the minimum
-norm solution of (2).
Theorem 2.1 Let the SVD of
be given as in (4). If
(5)
thenthe MSTLS problem with multiple right-hand sides (2) has the minimum
-norm solution:
(6)
wherethe weighted
-norm is defined by
.
Proof. By ( [8], (2.3)), we can get the minimum F-norm solution to (3) under the condition (5):
which leads to the minimum
-norm solution of (2)
Therefore, we complete the proof.
In this paper, all discussions are based on the solvability conditions (5). Next we give some lemmas which will be used in the next analysis.
Lemma 2.1 ( [21], Chapt. 2) Let
,
,
. Then
If an orthogonal matrix of size n is partitioned into a
block form, some interesting connections and properties among these four submatrix blocks are provided in the lemma below.
Lemma 2.2 ( [16], Lemma 2.1) Let
be an n-by-n orthogonal matrix with a 2-by-2 partitioning. Then
1)
has full column (row)rank if and only if
has full row (column) rank;
2)
,
,
.
Since the MSTLS solution is closely related to the matrix V of right singular vectors of augmented matrix, the first-order perturbation analysis of V will play an important role in next discussions. The next lemma gives the first-order perturbation analysis of V.
Lemma 2.3 ( [16], Lemma 2.2) Let
have the SVD in (4) with
and
be sufficiently small. Define
Then the matrix
of right singular vectors of
satisfies
where
is given by
Moreover, if
has full row (column)rank,then
has full row (column) rank.
3. Condition Numbers of XMSTLS
Let
and
, where
and
are the perturbations of the input data A and B, respectively.
Consider the perturbed MSTLS problem with multiple right-hand sides
(7)
Similarly, (7) is also treated as a perturbed WTLS problem. Let
, and the SVD of
be
(8)
where
,
and
are partitioned as in U,
and V in (4), respectively.
When the norm
of the perturbations is sufficiently small, then perturbation analysis of singular values can ensure that the perturbed MSTLS problem with multiple right-hand sides (7) has the minimum
-norm solution:
(9)
Let
. Now we introduce definitions of the normwise, mixed and componentwise condition numbers for
as follows.
Definition 3.1 The absolute normwise condition number for
is defined by
(10)
therelative normwise condition number for
is defined by
(11)
themixed condition number for
is defined by
(12)
andthe componentwise condition number for
is defined by
(13)
Definition 3.1 only provides general descriptions of the various condition numbers. It is usually hard to give their exact computable formulae. However, if
is a differentiable function with respect to the data, the condition numbers defined in Definition 3.1 can be exactly expressed in derivatives. We start from the differentiability of
.
Let the SVD of the matrices
be given as in (4). To derive the exact formulae of the condition numbers of
, we define the mapping
by
where
. It follows from Lemma 2.3 that
is continuous in a neighborhood of c. Using the definitions of the condition numbers of the mapping
at a fixed point c [22] [23] [24], and following [23] [24] [25], if
is Fréchet differentiable in a neighborhood of c, we have
(14)
(15)
(16)
(17)
where
denotes the Fréchet derivative of
at point c.
Before deriving the explicit expression for condition numbers, we give a useful lemma which proves that
is Fréchet differentiable in a neighborhood of
and gives the explicit expression for
.
Lemma 3.1 Under conditions (5), the mapping
defined above is continuous and Fréchet differentiable at
. Moreover, its Fréchet derivative has the expression
(18)
inwhich R and S are defined as in Lemma 2.3,and
with
.
Proof. We only prove the second statement since the first part is trivial. According to Lemma 2.3, it follows that there exists a proper matrix P such that
Since
has full row rank by Lemma 2.3, we have
Using Lemma 2.2 and only retaining the first-order terms give
which together with Lemma 2.1 and Lemma 2.3 leads to
Consequently, the Fréchet derivative of
at
is given by
which gives the desired result.
3.1. Normwise Condition Numbers
Next, we present the absolute and relative normwise condition numbers of
.
Theorem 3.1 Let R be defined as in Lemma 2.3, and
be defined as in Lemma 3.1. Under conditions (5), we have
(19)
(20)
Proof. By (14), (15), Lemma 3.1 and the fact that
, the desired results are easily obtained.
Remark 3.1 Taking
, our results in (19) and (20) reduce to those of the solution to TLS problem with multiple right-hand sides in ( [16], Theorem 3.3), respectively.
Computing
and
reduces to computing the spectral norm of matrix
. It should be noted that the Kronecker product enlarges the size of the matrix when m and n are large, so it impossible to explicitly form and store the high dimensions matrix. Along the similar lines as in ( [26], Algorithm 1), we also adopt the iterative technique based on the power method ( [27], p. 289) to eliminate the influence of the Kronecker product. We include it as an appendix.
In many applications, an upper bound would be sufficient to estimate the normwise condition number of the MSTLS solution. We next present the upper bounds for
and
, which only involve the singular values
and
of
. Such bounds are particularly appealing for large-scale MSTLS problem.
Theorem 3.2 Using the notation above, we have the upper bounds for the absolute and relative normwise condition numbers of
as follows:
(21)
and
(22)
where
and
are singular values of
.
Proof. According to Lemma 2.1 and Theorem 3.1, we use the CS decomposition ( [28], Theorem 2.6.3) and the property of 2-norm to follow a path similar to the proof in ( [16], Theorem 3.6), the corresponding results can be proved.
Remark 3.2 Taking
, our result (21) reduces to that of the TLS problem with multiple right-hand sides in ( [16], Theorem 3.6).
Note that
and
when
, and we can get the following corollary about the normwise condition numbers and their upper bounds for the MSTLS problem with single right-hand side by Theorems 3.1 and 3.2.
Corollary 3.1 Consider the MSTLS problem with single-hand side, if
and
, we have
(23)
and
(24)
wherex is the minimum
-norm solution of the MSTLS problem with single right-hand side.
Remark 3.3 Taking
, our results in (23) reduce to those of the TLS problem with single right-hand side in ( [16], Corollaries 3.4 and 3.8).
3.2. Mixed and Componentwise Condition Numbers
When the data are badly scaled and sparse, normwise condition numbers allow large relative perturbations on small entries and may give overestimated bounds. Instead of measuring perturbations by norms, a componentwise condition number is more suitable because it measures perturbation errors for each component of the input data [24]. Therefore, the mixed, componentwise condition numbers for the MSTLS problem are worth studying. In the following theorem, we present the mixed and componentwise condition numbers of the MSTLS problem.
Theorem 3.3 Using the notation above, we have the mixed and componentwise condition numbers of the MSTLS solution as follows:
(25)
and
(26)
where
Proof. The proof can easily be obtained by (16), (17) and Lemma 3.1, so we omit it here.
Remark 3.4 Taking
, our results in Theorem 3.3 reduce to those of the TLS problem with multiple right-hand sides in ( [16], Theorem 3.11).
The expressions of the condition numbers in Theorem 3.3 involve permutation matrix
(or
) and extensive computation of Kronecker products, so it is not easy to use these expressions to calculate the condition number directly, which is impractical for large-scale problem. Similarly, we also give upper bounds for the mixed and componentwise condition numbers of the MSTLS problem, respectively.
Theorem 3.4 Using the notation above, we have the upper bounds for the mixed and componentwise condition numbers of the MSTLS solution as follows:
(27)
(28)
where
has the i-th column
Proof. According to Theorem 3.3 and Lemma 2.1, we have
which together with (25), (26) leads to (27) and (28), respectively.
Remark 3.5 Taking
, our results in Theorem 3.4 reduce to those of the TLS problem with multiple right-hand sides in ( [16], Theorem 3.12).
4. Numerical Experiments
In this section, we present three numerical experiments to illustrate that the tightness of the upper bound estimates on the absolute normwise, mixed and componentwise condition numbers of the MSTLS solution and the operability of Algorithm 1, respectively. All of the following numerical experiments are performed via MATLAB R2014b in a laptop with AMD A10-7300 Radeon R6, 10 Compute Cores 4C + 6G by using double precision. Each figure in the following tables is the average of 500 experiments.
Example 4.1 Let
and
be given by its SVD decomposition
where
and U is an arbitrary 4-by-4 orthogonal matrix. This example is inspired by ( [16], Example 3.7).
We partition the unitary matrix V:
We know
and
. Hence the approximate linear system (2) has the MSTLS solutions and the normwise condition number of its minimum
-norm solution
satisfies Table 1, which means that the upper bound
can be reached and therefore is optimal.
Example 4.2 Let
with
and
being arbitrary orthogonal matrices and
. We choose
such that
and
, where
,
, E, and F have entries from the standard normal distribution such that
and
with
.
This example is a modification from [14] and Zheng et al. ( [16], Example 5.2) used the similar example to compare the mixed and componentwise condition numbers with their corresponding upper bounds of the TLS problem with multiple right-hand sides. Next, we will show the exact condition numbers of
and its upper bounds when
, respectively.
We compute the mixed condition number
, the componentwise condition number
of
and their corresponding upper bounds
and
with
, 0.01, 0.1 and 1, and report the results in Table 2, Table 3.
As shown in Table 2 and Table 3, we can see that the upper bounds are at most two orders of magnitude larger than the corresponding exact condition number. That is, the upper bounds in Theorem 3.4 can estimate their corresponding condition numbers well.
Example 4.3 Let
be given as in Example 4.1. Take
, and
,
,
, respectively.
The quantity
measures the distance of our problem to nongenericity, and we have in exact arithmetic
. Then by varying
, we can generate different MSTLS problems, and by considering values of
, it is possible to study the behavior of the MSTLS condition number in the context of close-to-nongeneric problems. Firstly, we compare in Table 4 the exact condition number
given in Theorem 3.1, the upper bound
given in Theorem 3.2. We also report the condition number computed by Algorithm 1, denoted by
, and the corresponding number of power iterations (the algorithm terminates when the difference between two successive values is lower than 10−12).
![]()
Table 1. Comparison of condition number
and its upper bound
with different
.
![]()
Table 2. Comparison of condition number
and its upper bound
with different
.
![]()
Table 3. Comparison of condition number
and its upper bound
with different
.
![]()
Table 4. MSTLS conditioning for several values of
.
From Table 4, we observe that the upper bounds of the condition numbers are sharp although there may be a factor
between the exact absolute normwise condition number
and its upper bound
sometimes.
is always equal or very close to
.
5. Conclusion
In this paper, we are concerned with the matrix-scaled total least squares (MSTLS) problem with multiple right-hand sides. To our best knowledge, the condition numbers of the MSTLS problem have so far not been considered systematically. Based on this view, we focus on the normwise, mixed and componentwise condition numbers of the MSTLS problem under some mild conditions, respectively. Then the tight and computable upper bound estimates are provided. Numerical examples are given to illustrate the tightness of these bounds. In addition, large-scale problems are more interesting, we can make efforts on computational issues associated with these problems, possibly with additional structures (like sparseness) for the defining matrices. This will be a good research direction in the future.
Acknowledgements
The authors are grateful to the anonymous referees and the Editor for their detailed and helpful comments that led to a substantial improvement to the paper.
Funding
Longyan Li is supported by the Research and Training Program for College Students (No. A2020-17).
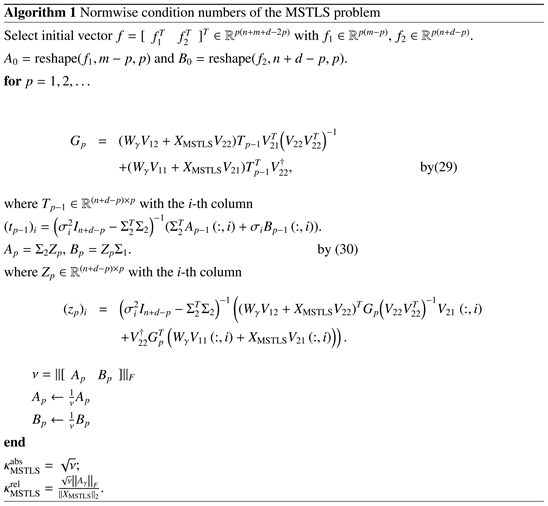
Appendix A
Denote
. This algorithm involves, however, the computation of the products of H by a vector
and
by a vector
. We describe now how to perform the two operations.
Let
with
,
,
and
. It follows from Lemma 2.2 that
which together with Lemma 2.1 and the fact that
gives
(29)
where
with the i-th column
Similarly, let
and
. Then we have
(30)
where
with the i-th column
Using (29) and (30), we can now write in Algorithm 1 the iteration of the power method ( [27], p. 289) to compute the absolute and relative normwise condition numbers
and
of
. In this algorithm we assume
and the SVD of
are available.