1. Introduction
Fractional differential equations appear frequently in various fields involving science and engineering, namely, in signal processing, control theory, diffusion, thermodynamics, biophysics, blood flow phenomena, rheology, electrodynamics, electrochemistry, electromagnetism, continuum and statistical mechanics and dynamical systems. For more details on the applications of fractional differential Equations (see [1] [2] [3] [4] [5] ). The concept of fractional calculus is now considered as a partial technique in many branches of science including physics (Oldham and Spanier [6] ). Srivastava et al. [7] gave the model of under actuated mechanical system with fractional order derivative and Sharma [8] studied advanced generalized fractional kinetic equation in Astrophysics. Caputo [9] reformulated the more “classic” definition of the Riemann-Liouville fractional derivatives in order to use integer order initial conditions to solve his fractional order differential equation. Kowankar and Gangel [10] reformulated the Riemann-Liouville fractional derivative in order to differentiate nowhere differentiable fractal functions.
In general, most of fractional differential equations do not have exact solutions. Instead, analytical and numerical methods become increasingly important for finding solution of fractional differential equations. In recent years, many efficient methods for solving FDEs have been developed. Among these methods are the monotone iterative technique [11] [12], topological degree theory [13], and fixed point theorems [14] [15] [16]. Moreover, numerical solutions are obtained by the following methods: the Adomian decomposition method and the variational iteration method [17], homotopy perturbation method [18] [19], Haar wavelet operational method [20], Neural networks [21], and so forth. Very recently, Hamdan et al. [22] applied Haar Wavelet and the product integration methods to solve the fractional Volterra integral equation of the second kind. In addition, Saadeh [23] in her master thesis has employed several numerical methods for solving fractional differential equations. These methods are the Adomian decomposition method, Homotopy perturbation method, Variational iteration method and Matrix approach method. A comparison between these methods has been carried out. In spirit, our numerical methods, namely the homotopy perturbation and the matrix approach methods are an improvement to those methods presented in the master thesis by one of the authors of this article. A comparison between these methods is carried out by solving some test examples using MAPLE software.
The paper is organized as follows: In Section (2) we recall some basic definitions and notions concerning fractional calculus. In Section (3), we introduce the homotopy perturbation method. The matrix approach method is addressed in Section (4). The proposed methods are implemented using numerical examples with known analytical solution by applying MAPLE software in Section (5). Conclusions are given in Section (6).
2. Mathematical Preliminaries and Notions
In this section, we review some necessary definitions and mathematical preliminaries concerning fractional calculus that will be used in this work.
Definition 1. [24] The Riemann-Liouville fractional integral operator of order
,
,
of a function
is defined as
Definition 2. [25]: (Riemann-Liouville Derivative): Let
. The Riemann-Liouville derivative of fractional order p is defined as:
(1)
Definition 3. [26]: The Grumwald-Letnikov fractional derivative with fractional order p if
, is defined as:
(2)
where
.
Definition 4. [6]: Grunwald-Letnikov fractional derivative of the power function
is given as:
(3)
Definition 5. [27]: The Caputo derivative of fractional order p of a function
is defined as
(4)
Theorem 1. [28]: The Caputo fractional derivative of the power function satisfies:
(5)
Theorem 2. [26]: Leibniz rule for Riemann-Liouville fractional derivative: Let
,
,
, and
. If
, and their derivatives are continuous on
, then the following holds:
(6)
Proof. See [26] for more details.
Theorem 3. [29]: Leibniz rule for Caputo fractional derivative: Let
,
,
, and
. If
, and their derivatives are continuous on
, then the following holds
(7)
Proof. See [29] for more details.
3. Homotopy Perturbation Method (HPM)
The fractional initial value problem in the operator form is:
(8)
(9)
where
is the initial conditions, L is the linear operator which might include other fractional derivative operators
, while the function g, the source function is assumed to be in
if
is an integer, and in
if
is not an integer. The solution
is to be determined in
.
In virtue of [16], we can write Equation (8) in the homotopy form
(10)
or
(11)
where
is an embedding parameter. If
, Equations (10) and (11) become
(12)
when
, both Equations (10) and (11) yields the original FDE Equation (8).
The solution of Equation (8) is:
(13)
Substituting
in Equation (13) then we get the solution of Equation (8) in the form:
(14)
Substituting Equation (13) into Equation (11) and collecting all the terms with the same powers of p, we get:
(15)
(16)
(17)
(18)
and so on.
Following [6], we can write the first three terms of the homotopy perturbation method solution as:
The general form of the HPM solution is:
The homotopy perturbation solution takes the general form:
(19)
4. Matrix Approach Method
4.1. Left-Sided Fractional Derivative
Consider a function
, defined in
, such that
for
and of real order
, such as:
(20)
Let us take equidistant nodes with the step size
in the interval
, where
and
. Using the backward fractional difference approximation for the derivative at the points
, we have:
(21)
Equation (21) is equivalent to the following matrix form [11]:
(22)
(23)
In Equation (22), the column vector of functions
is multiplied by the matrix
(24)
the result is the column vector of approximated values of the fractional derivatives
The generating function for the matrix is
(25)
Since
and
are lower triangular matrices then we have
Theorem 4. [26]: Since the following
holds if
(26)
then we can treat such matrices as discrete analogues of the corresponding left-sided fractional derivatives
where
and
.
4.2. Right-Sided Fractional Derivative
Consider a function
, defined in
, such that
for
.
Then its right sided fractional derivative of real order
is
(27)
Thus we get the discrete analogue of the right sided fractional differentiation with the step size
in the interval
, where
and
, which is represented by the matrix [6]:
(28)
The generating function for the matrix
is the same for
The transposition of the matrix
gives the matrix
and the opposite holds:
(29)
5. Numerical Examples and Results
In this section, in order to examine the accuracy of the proposed methods, we solve two numerical examples of fractional differential equations. Moreover, the numerical results will be compared with exact solution.
Example 1. Consider the linear fractional differential equation:
(30)
with initial conditions:
.
The exact solution of Equation (30) with
is:
In virtue of Equation (11), we can write Equation (30) in the homotopy form:
(31)
the solution of Equation (30) is:
(32)
Substituting Equation (32) into equation Equation (31) and collecting terms with the same power of p, we get:
(33)
Applying
and the inverse operator of
, on both sides of Equation (33) and using the definition of Riemann-Liouville fractional integral operator (
) of order
we obtain:
Hence the solution of Equation (30) is:
(34)
(35)
when
(36)
Now, we implement Algorithm 1 to solve Equation (30) using the matrix approach method.
Table 1 displays the exact and numerical results using the matrix approach method with
and
. The maximum error with
is 0.039016195358901. Figure 1(a) compares both the exact and numerical solutions for the fractional differential Equation (30). Moreover, Figure 1(b) shows the absolute error between exact and numerical solutions.
![]()
Table 1. The exact and numerical solutions using the matrix approach method where
.
![]() (a)
(a) ![]() (b)
(b)
Figure 1. A comparison between exact and approximate solutions by applying Algorithm 1 for Equation (30) with
. (a) A comparison between the exact and approximate solution in example (1); (b) Absolute error between exact and numerical solution in example (1).
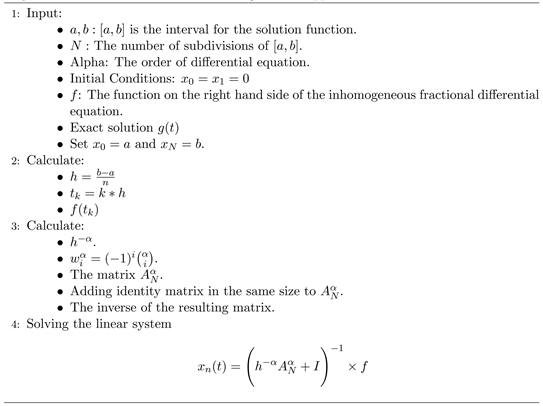
Algorithm 1. Numerical realization using matrix approach method.
For
and
, Figure 2(a) and Figure 3(a) compare both the exact and numerical solutions for the fractional differential Equation (30). Moreover, Figure 2(b) and Figure 3(b) show the absolute error between exact and numerical solutions.
Example 2. Consider the linear fractional differential equation:
(37)
with initial conditions:
.
![]() (a)
(a) ![]() (b)
(b)
Figure 2. A comparison between exact and approximate solutions by applying Algorithm 1 for Equation (30) with
. (a) A comparison between the exact and approximate solution in example (1); (b) Absolute error between exact and numerical solution in example (1).
![]() (a)
(a) ![]() (b)
(b)
Figure 3. A comparison between exact and approximate solutions by applying Algorithm 1 for Equation (30) with
. (a) A comparison between the exact and approximate solution in example (1); (b) Absolute error between exact and numerical solution in example (1).
The exact solution of Equation (37) is:
Now, we implement the homotopy perturbation method to solve Equation (37).
In virtue of Equation (11), we can write Equation (37) in the homotopy form:
(38)
The solution of Equation (38) has the form:
(39)
Substituting Equation (39) into Equation (38) and collecting terms with the same power of p, then we get:
(40)
Applying
and the inverse operator of
, on both sides of Equation (40), then we get: and using the definition of Riemann-Liouville fractional integral operator (
) of order
we obtain:
Then the solution of Equation (37) has the general form:
(41)
(42)
(43)
when
, we get
(44)
Now, we implement Algorithm 1 to solve Equation (37) using the matrix approach method. Table 2 contains the exact and numerical results using the matrix approach method with
and
. The maximum error with
is 0.015888820145463. Figure 4(a) compares both the exact and numerical solutions for the (37). Moreover, Figure 4(b) shows the absolute error between exact and numerical solutions. For
and
, Figure 5(a) and Figure 6(a) compare both the exact and numerical solutions for the fractional differential Equation (30). Moreover, Figure 5(b) and Figure 6(b) show the absolute error between exact and numerical solutions.
![]()
Table 2. The exact and numerical solutions using the matrix approach method where
.
![]() (a)
(a) ![]() (b)
(b)
Figure 4. A comparison between exact and approximate solutions by applying Algorithm 1 for Equation (37) with
. (a) A comparison between the exact and approximate solution in example (2); (b) Absolute error between exact and numerical solution in example (2).
![]() (a)
(a) ![]() (b)
(b)
Figure 5. A comparison between exact and approximate solutions by applying Algorithm 1 for Equation (37) with
. (a) A comparison between the exact and approximate solution in example (2); (b) Absolute error between exact and numerical solution in example (2).
![]() (a)
(a) ![]() (b)
(b)
Figure 6. A comparison between exact and approximate solutions by applying Algorithm 1 for Equation (37) with
. (a) A comparison between the exact and approximate solution in example (2); (b) Absolute error between exact and numerical solution in example (2).
6. Conclusion
In this article, two numerical techniques namely, the homotopy perturbation method and the matrix approach method have been proposed and implemented to solve fractional differential equations. The accuracy and the validity of these techniques are tested with some numerical examples. The results show clearly that both techniques are in a good agreement with the analytical solution. According to numerical results mentioned in tables and figures, we conclude that the matrix approach method provides more accurate results than its counterpart and therefore is more advantageous. In addition, we strongly believe that the matrix approach method is regarded to be one of the most effective methods among the other methods mentioned in the literature. It is known for its fast converges and accuracy.
List of Nomenclatures
1)
: Fractional Derivative.
2)
: Gamma Function.
3)
: Libera Integral Operator.
4)
: Riemann-Liouville Fractional Integral Operator.
5)
: Mittage Leffer Functions.
6)
: Identity Operator.
7)
: Grumwald-Letnikov Fractional Derivative.
8)
: Riemann-Liouville Derivative of Order p.
9)
: Caputo Fractional Derivative.