An Efficient Method to Reduce the Numerical Dispersion in the HIE-FDTD Scheme ()
1. Introduction
The finite-difference time-domain (FDTD) method [1] has been proven to be an effective means that provides accurate predictions of field behaviors for varieties of electromagnetic interaction problems. However, as it is based on an explicit finite-difference algorithm, the Courant–Friedrich–Levy (CFL) condition [2] must be satisfied when this method is used. Therefore, a maximum time-step size is limited by minimum cell size in a computational domain, which makes this method inefficiency for the problems where fine scale dimensions are used.
To relax the Courant limit on the time step size of the FDTD method, a three–dimensional (3-D) hybrid implicit-explicit finite-difference time-domain (HIE-FDTD) method has been developed recently [3]. In this method, the CFL condition is not removed totally, but being weaker than that of the conventional FDTD method. The time step in this scheme is only determined by two space discretizations, which is extremely useful for problems where a very fine mesh is needed in one direction. However, the numerical dispersion error of the HIE-FDTD scheme is larger than that of the conventional FDTD method.
In this letter, a simple and efficient approach for reducing the numerical dispersion of the 3-D HIE-FDTD method is proposed. Numerical results indicate that the numerical dispersion of the method can be notably reduced when a proper parameter is introduced [4]. As a result, the usefulness and effectiveness of the HIE-FDTD method can be significantly enhanced. The numerical dispersion of the new algorithm is studied analytically and validated by a numerical simulation, and the results are compared with both the standard HIE-FDTD method and the conventional FDTD method.
2. Formulations
To reduce the numerical dispersion of the 3-D HIEFDTD method, parameter N is introduced into the HIE-FDTD discretization. The modified algorithm is described as follows:
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
 and
and  are the index and size of time-step,
are the index and size of time-step,  ,
,  and
and  are the spatial increments respectively in
are the spatial increments respectively in ,
,  and
and  directions,
directions,  ,
, , and
, and  denote the indices of spatial increments respectively in
denote the indices of spatial increments respectively in ,
,  , and
, and  directions,
directions,  and
and  are the permittivity and permeability of the surrounding media, respectively. When the value of parameter N is equal to 1, Equations (1)-(6) is the formulations of standard HIE-FDTD method [3].
are the permittivity and permeability of the surrounding media, respectively. When the value of parameter N is equal to 1, Equations (1)-(6) is the formulations of standard HIE-FDTD method [3].
Obviously, updating of  component, as shown in Equation (3), needs the unknown
component, as shown in Equation (3), needs the unknown  component at the same time, thus the
component at the same time, thus the  component has to be updated implicitly. Substituting Equation (5) into Equation (3), the equation for
component has to be updated implicitly. Substituting Equation (5) into Equation (3), the equation for field is given as:
field is given as:
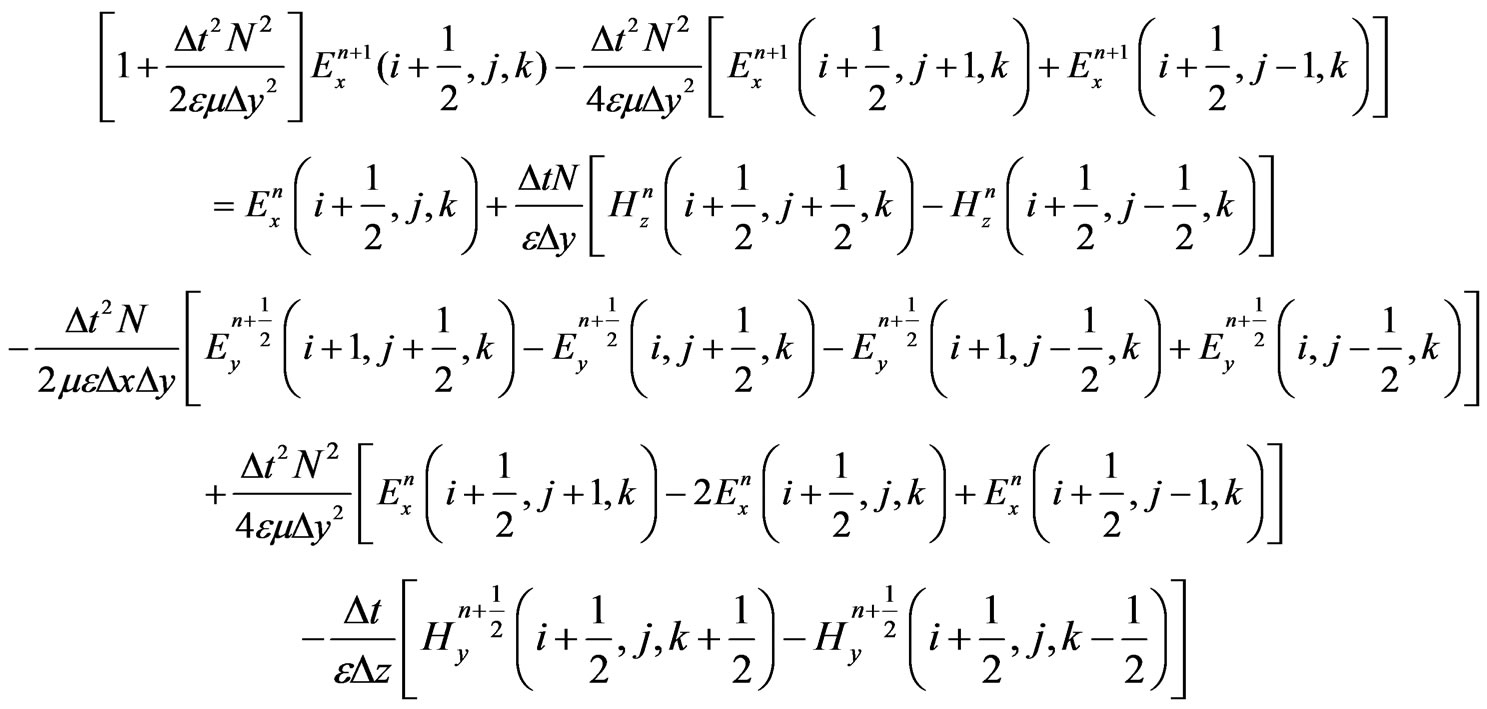 (7)
(7)
Similarly, updating of  component needs the unknown
component needs the unknown  component at the same time-step. Substituting Equation (6) into Equation (4), we obtain the discrete equation for
component at the same time-step. Substituting Equation (6) into Equation (4), we obtain the discrete equation for field,
field,
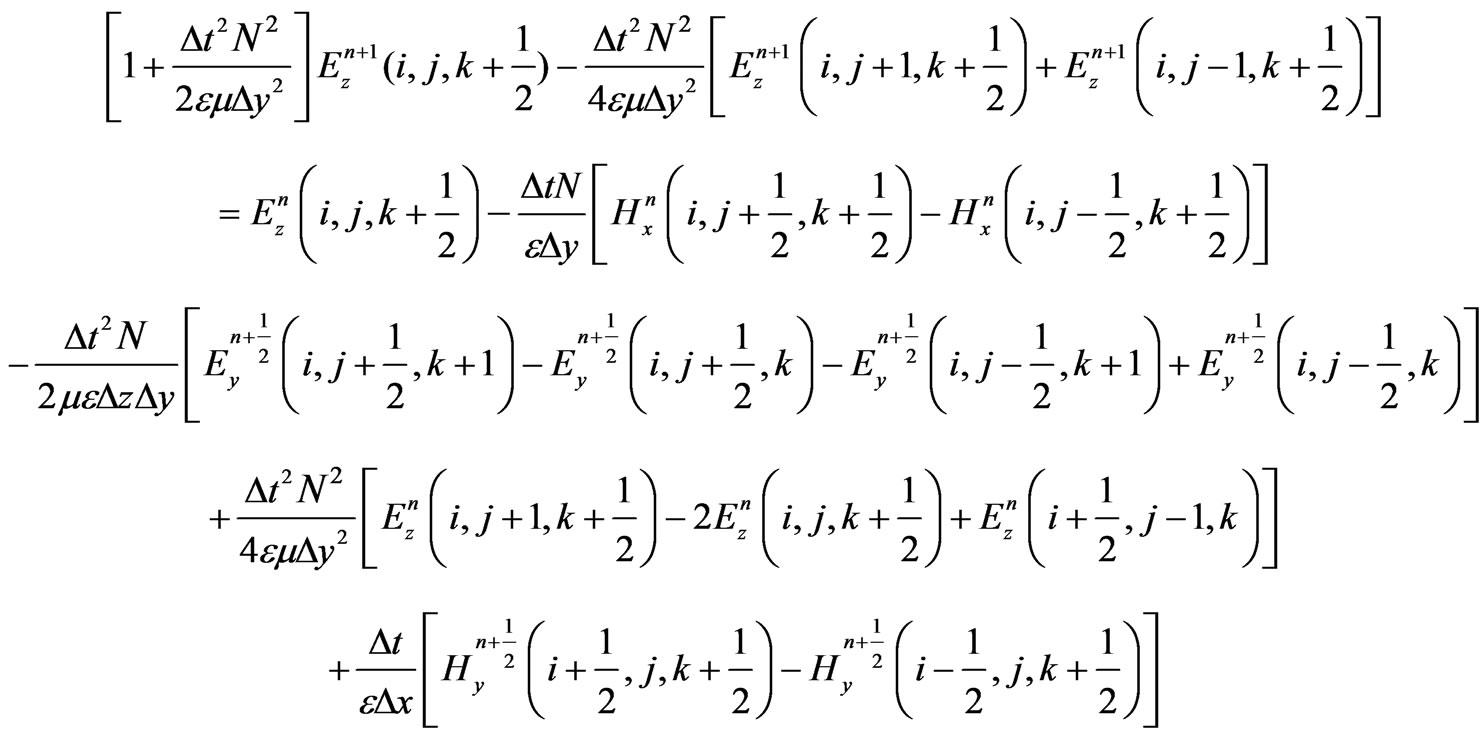 (8)
(8)
Therefore, the field components are updated by using Equations (1), (2), and (5)-(8). Components and
and  are explicitly updated first by using Equations (1) and (2). Then,
are explicitly updated first by using Equations (1) and (2). Then,  and
and components are updated implicitly by solving the tridiagonal matrix equations by using Equations (7) and (8). After
components are updated implicitly by solving the tridiagonal matrix equations by using Equations (7) and (8). After  and
and are obtained, components
are obtained, components  and
and are explicitly updated straightforward by using Equations (5) and (6).
are explicitly updated straightforward by using Equations (5) and (6).
3. Weakly Conditionally Stability
The relations between field components of Equations (1)(6) can be represented in a matrix form as:

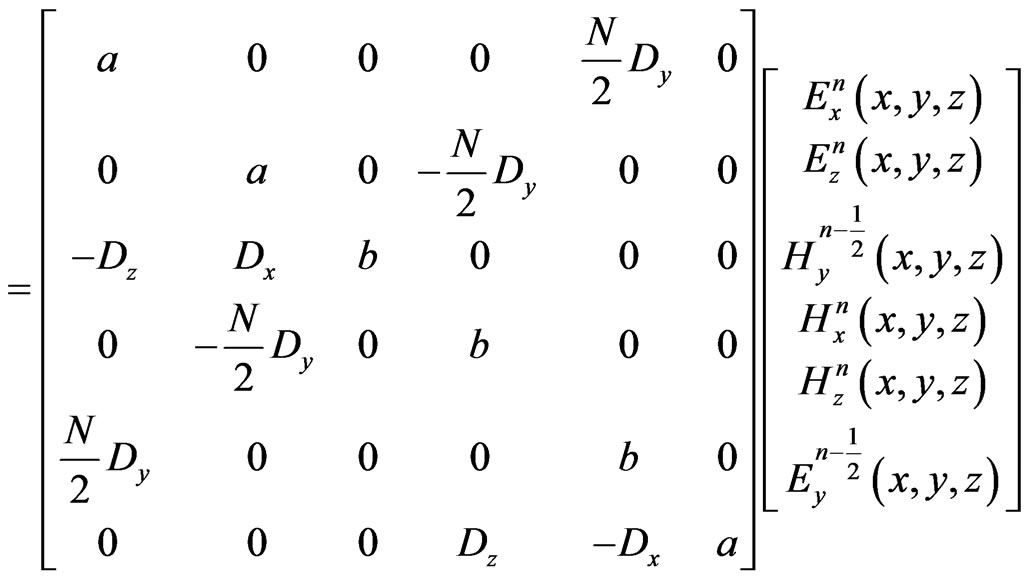 (9)
(9)
where ,
,  ,
,  (
( ) represents the first derivative operator with respect to
) represents the first derivative operator with respect to .
.
With no loss of generality, the field components can be written as follows:
 (10)
(10)
 (11)
(11)
where ,
, ,
, .
.

 are wave numbers.
are wave numbers.  indicates growth factor.
indicates growth factor.  are the amplitude of the field components, respectively.
are the amplitude of the field components, respectively.
In a discrete space,  can be denoted as:
can be denoted as:
 (12)
(12)
Then:
 (13)
(13)
 (14)
(14)
 (15)
(15)
where,
 ,
,  ,
,
Substituting these represents into Equation (9), the matrix becomes:
 (16)
(16)
For a nontrivial solution of (16), the determinant of the coefficient matrix in (16) should be zero. It can be obtained:
 (17)
(17)
where:
 ,
,
 ,
,
 ,
, 
is the speed of light in the medium.
By solving Equation (17), the growth factor  is obtained
is obtained
 (18)
(18)
 (19)
(19)
To satisfy the stability condition during field advancement, the module of growth factor  can’t be larger than 1. It is evident that the module of
can’t be larger than 1. It is evident that the module of  is unity. For the values of
is unity. For the values of  and
and , when the condition
, when the condition  is satisfied,
is satisfied,  can be obtained. The limitation for time-step size can be calculated as follows:
can be obtained. The limitation for time-step size can be calculated as follows:


 (20)
(20)
This scheme is weakly conditionally stable. The time step is only determined by two space discretizations. The parameter N doesn’t affect the weakly conditionally stability of the HIE-FDTD method.
4. Numerical Dispersion Analysis
We now study the numerical dispersion in the modified HIE-FDTD algorithm. Substitute  into Equation (16), it can be obtained:
into Equation (16), it can be obtained:
 (21)
(21)
For comparison, we take a look at the numerical dispersion relation of the standard HIE-FDTD method.
 (22)
(22)
Compared to the dispersion Equation (22) of the standard HIE-FDTD method, it can be obtained that there is a factor  added to the last term in the right-hand side of the numerical dispersion relations of Equation (21). When a proper value of parameter N is selected, the numerical dispersion of the HIE-FDTD method can be controlled, causing the numerical dispersion to decrease significantly, which is validated in next section.
added to the last term in the right-hand side of the numerical dispersion relations of Equation (21). When a proper value of parameter N is selected, the numerical dispersion of the HIE-FDTD method can be controlled, causing the numerical dispersion to decrease significantly, which is validated in next section.
5. Numerical Validation
Suppose that a wave propagating at angle  and
and  is in the spherical coordinate system. Then,
is in the spherical coordinate system. Then,  ,
,  , and
, and . By substituting them into dispersion relations (21), numerical phase velocity
. By substituting them into dispersion relations (21), numerical phase velocity  of modified HIE-FDTD method can be solved numerically. To make the discussion simple and easy, only the uniform cell
of modified HIE-FDTD method can be solved numerically. To make the discussion simple and easy, only the uniform cell  is considered here.
is considered here.  is set to be
is set to be , with
, with  the operating frequency.
the operating frequency.
On the  plane
plane . It can be easily seen that the numerical dispersion of modified HIE-FDTD method is the same as that of standard HIE-FDTD method. So we only consider the dispersion performance comparison between the modified HIE-FDTD and standard HIE-FDTD method on other planes.
. It can be easily seen that the numerical dispersion of modified HIE-FDTD method is the same as that of standard HIE-FDTD method. So we only consider the dispersion performance comparison between the modified HIE-FDTD and standard HIE-FDTD method on other planes.
Figures 1-4 show the normalized phase velocities with respect to angle for different CFLN values.
for different CFLN values.  is set as 45° and 90° respectively. The CFLN is defined as the ratio of the time-step size and the maximum time-step size satisfied with the 3-D CFL condition of conventional FDTD method. Parameter N equal to 1 represents the normalized phase velocity of standard
is set as 45° and 90° respectively. The CFLN is defined as the ratio of the time-step size and the maximum time-step size satisfied with the 3-D CFL condition of conventional FDTD method. Parameter N equal to 1 represents the normalized phase velocity of standard
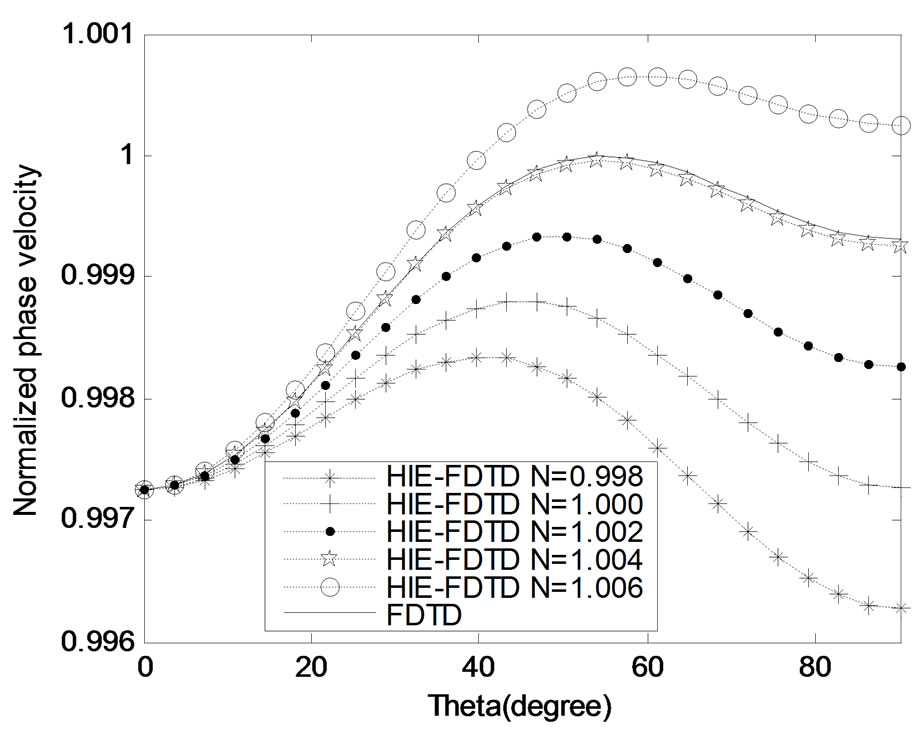
Figure 1. When CFLN = 1, the normalized phase velocities with respect to angle  for different parameter N (
for different parameter N ( 45°).
45°).
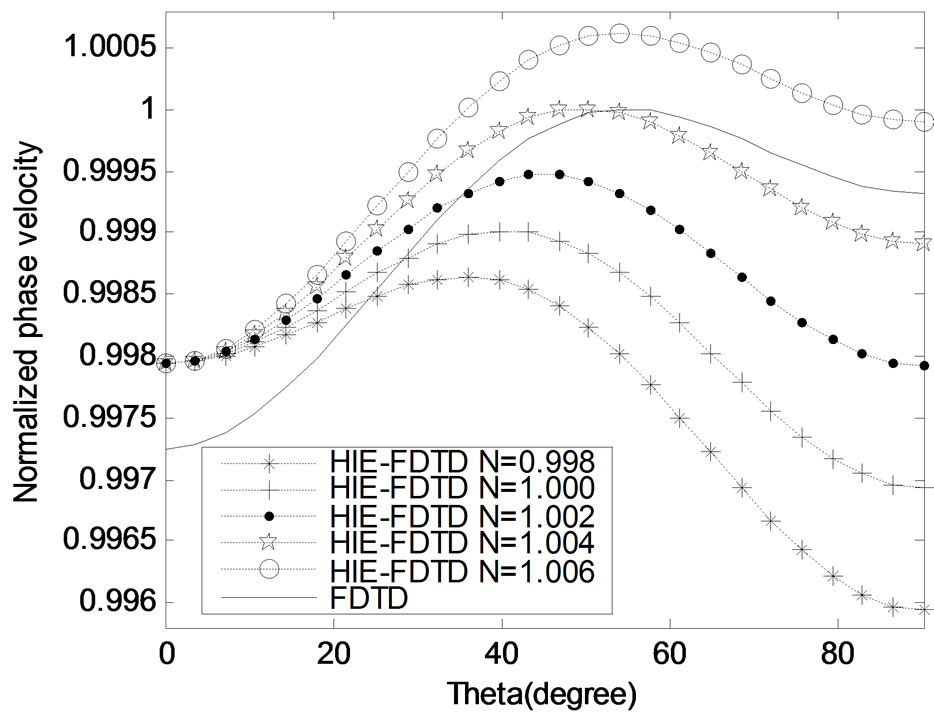
Figure 2. When CFLN = 1.2, the normalized phase velocities with respect to angle  for different parameter N (
for different parameter N ( 45°).
45°).
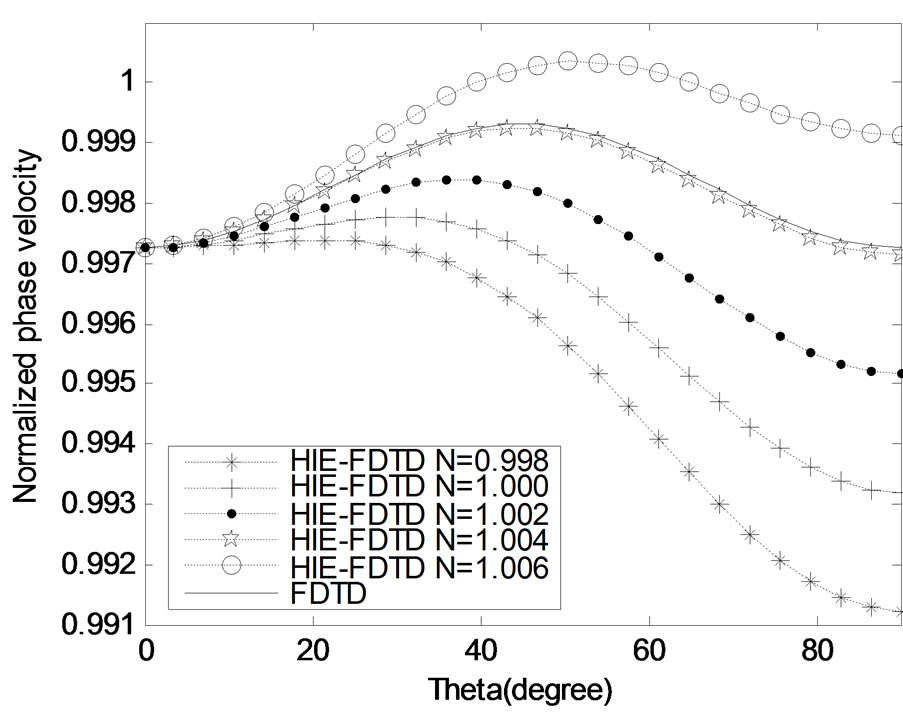
Figure 3. When CFLN = 1, the normalized phase velocities with respect to angle  for different parameter N (
for different parameter N ( 90°).
90°).
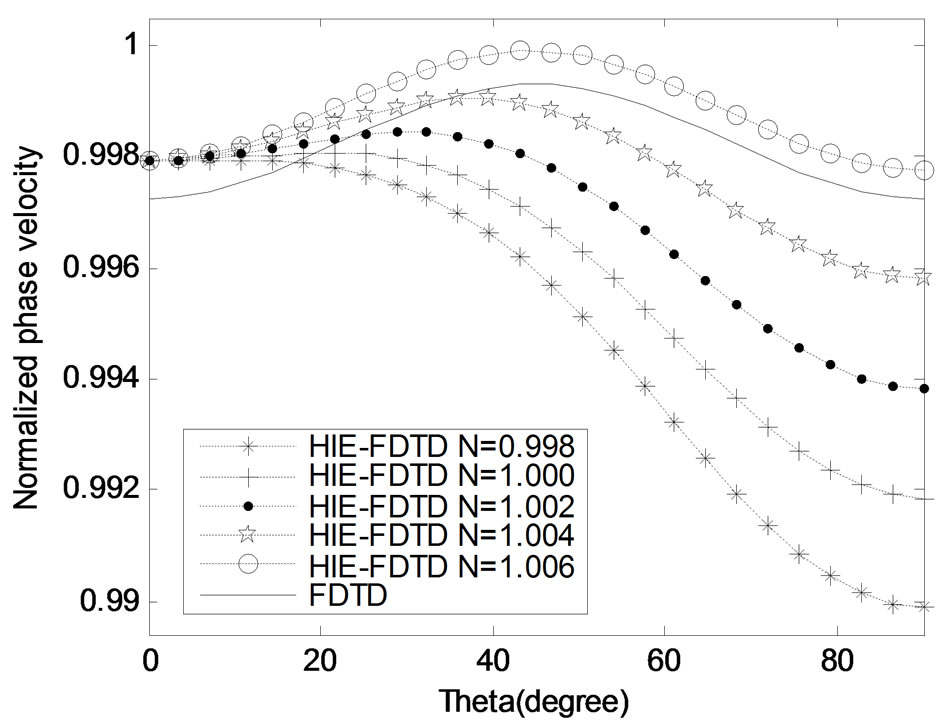
Figure 4. When CFLN = 1.2, the normalized phase velocities with respect to angle  for different parameter N (
for different parameter N ( 90°).
90°).
HIE-FDTD method. For comparison, the normalized phase velocity of conventional FDTD method is also plotted in these figures.
It can be seen from these figures that the numerical dispersion error of the standard HIE-FDTD (N=1.000) scheme is larger than that of the conventional FDTD method, especially when  is close to 90°. When CFLN = 1.2, the dispersion error along the y axis (
is close to 90°. When CFLN = 1.2, the dispersion error along the y axis ( 90°,
90°, = 90°) of standard HIE-FDTD method is almost 4 times as that of conventional FDTD method.
= 90°) of standard HIE-FDTD method is almost 4 times as that of conventional FDTD method.
For the modified HIE-FDTD method, the dispersion error is reduced as the value of parameter N increase. Under the CFLN = 1, with N = 1.004, the normalized phase velocities of the modified HIE-FDTD is almost the same as that of the conventional FDTD method for both  45° and
45° and  90° planes. Apparently, the dispersion performance of HIE-FDTD method can be controlled by selecting parameter N.
90° planes. Apparently, the dispersion performance of HIE-FDTD method can be controlled by selecting parameter N.
However, when the value of N exceeds the value 1.004, the normalized phase velocities will exceed 1, which is not the performance we expect. So, select a proper value for parameter N is the key factor for reducing the dispersion error of HIE-FDTD method. It can be easily decided by Equation (22) numerically.
6. Conclusions
A parameter optimized HIE-FDTD method is presented in this letter. The parameter is introduced to minimize the dispersion error. The stability analysis shows that this algorithm is also weakly conditionally stable. Numerical experiments show that this algorithm can dramatically reduce the dispersion error without introducing additional computational cost.
7. Acknowledgements
This work was supported by National Natural Science Foundations of China (No. 61001039 and 60501004), and also supported by the Research Fund for the Doctoral Program of Higher Education of China (20090201120030).