1. Introduction
In recent years, nonlinear expectation theory has been applied more and more widely in the financial field. It can not only solve many uncertain problems in the financial field, but also has almost all the properties of classical mathematical expectation except linearity. In 2006, Peng [1] proposed the concepts of G-normal distribution G-expectation and G-Brownian motion, and established a complete theoretical framework. In 2008, Peng [2] proved the central limit theorem and the law of large numbers under sublinear expectations. Moreover, Peng [3] studied the existence and uniqueness of solutions of stochastic differential equations driven by G-Brownian motion under Lipschitz condition. In 2009, Peng and Hu [4] [5] studied more general nonlinear independent stationary incremental processes, especially nonlinear Lévy processes involving jump processes, and obtained the Representation theorem of G-expectation by Kolmogorov method under nonlinear expectations. In 2010, Peng [6] proposed the nonlinear expectation of backward stochastic differential equations and other applications. In 2013, Ren [7] proved the representation theorem for G-Lévy processes. Subsequently, Lin [8] introduces the stochastic integral of the increment process in the nonlinear expectation frame, and obtains the well-fitting theory of the solution of the reflection stochastic differential equation driven by G-Brown motion. In 2014, Geng et al. [9] developed G-SDE’s orbital analysis theory through rough-Path theory. Based on the development of nonlinear stochastic differential equation theory, Gao and Jiang [10] studied the large deviation problem of G-stochastic differential equation, and Gao and Xu [11] gave the concept of relative entropy in the framework of c expectation, thus establishing the principle of large deviation of empirical measures of independent random variables in the framework of sublinear expectation. Liu [12] studied some properties of multiple G-Itô integrals in G-expectation space. More information about G-expectations can be found in the literature [13] .
In this paper, we first give some related concepts and lemmas, including G-Brownian motion and G-Lévy process, G-Itô formula and product formula, and then use the above concepts and lemmas to get the definition of multiple G-Itô integrals, and give the proof process and examples.
The remainder of this paper is organized as follows: In Section 2, we first give the definition and properties of nonlinear space, and then introduce some concepts and theorems related to G-Brownian motion. In Section 3, we define several Itô integrals driven by multidimensional G-Brownian motion and G-Lévy process, and give relevant proofs. Finally, some important formulas for calculating G-Itô multiple integrals are given.
2. Preliminaries and Notation
In this section, we will give concepts related to the G-Lévy process. More relevant theories can be found in references [1] [2] [3] . Let
be a given set, and a vector lattice
on
is a linear space consisting of real-valued functions defined on
, and the following conditions are satisfied: 1) The constant c of each real-valued function is in
; 2) if
, also to have
. The function in
is called the random variable, and the binary
is called the random variable space. A nonlinear expectation
is a function defined on the space H of random variables that satisfies the following four properties
: 1) Monotonicity; 2) Preserving of constants; 3) Sub-additivity; 4) Positive homogeneity. The term triple
a nonlinear expectation space.
G-Brownian Motion and G-Lévy Process
Definition 1. [1] (G-Brownian motion) If for every
and
, the following properties are satisfied:
1)
;
2) The increment of
is smooth and independent.
We call the random process
defined in a sublinear expectation
space for the Brown motion of
.
Definition 2. [14] (G-Lévy process) Let
be the d dimensional càdlàg process on a sublinear expectation space
. If
satisfies the following properties, then
is said to be G-Lévy process.
1)
;
2) Independent increments: for each
the increment
is independent;
3) Stationary increments: the distribution of the increments
is stable and does not depend on t;
4) for each
,
;
5) Two processes
and
satisfy the following conditions
;
for all
.
Definition 3. [15] [16] (Poisson process) Let
such that
, Suppose there is a measure
such that
and
. If
, let’s say G-Lévy process X is a finite activity G-Lévy process X. When
, the Lebesgue measure on the interval
is
and
, Where
is the inverse of
. When
, consider the Knothe-Rosenblatt rearrangement to transport measure
and measure v, More details in reference. Consider
be a probability space, it has a Brownian motion W and a Lévy process, which is independent of W. We define
in the finite activity case
define the Poisson process M with intensity
by putting
.
Definition 4. [3] We first consider the quadratic variation process of one-dimensional G-Brownian motion
with
. Let
be a sequence of partitions of
. We consider
As
, the first term of the right side converges to
in
. The second term must be convergent. We denote its limit by
, i.e.,
By the above construction,
is an increasing process with
. We call it the quadratic variation process of the G-Brownian motion.
Next, we will give two important lemmas under G-Lévy process.
Lemma 1. [1] (G-Itô formula) We denote
be a m-dimensional G-Brownina motion. Let
be bounded with bounded derivatives and
are uniformly Lipschitz. Let
be fixed and let
be the i-th component of
satisfying
where
be the i-th of
,
and
is the lines i-th and j-th of
and
. Let
is m-dimensional G-Brownian and
G-Lévy process, we have
Lemma 2. (Product rule) [1] For the m-dimensional G-Brownian and one-dimensional G-Lévy jump process, according to G-Itô formula, we have the following result as follows:
where
,
.
3. Main Results
In this section, we will introduce two theorems of the multi-dimensional G-Itô integral under G-Lévy process. We firstly give the definition of multiple G-Itô integral
. Then we will introduce two theorems.
We shall call a row vector
, where
,
and
. We define a multi-index of length
. Moreover,
and
denote the multi-index that deletes the first and last component of
. Next, we denote the set of all multi-indices by
where v is the multi-index of length zero.
Definition 5. For
and
, we introduce the definition of multiple G-Itô integral
as follows:
where
,
is G-Brownian motion for
,
for
,
is a compensated G-Lévy jump process.
By using the Definition 5, we have the following result as follows:
For the simple of theorem proving, we define some notation such as
and
for
. Next, we will introduce two theories under G-Lévy process.
Theorem 1. For multi-index
(
), and
are not equal with each other. The set
be the all of the n level arrangement of
, define
such that
Proof. For
, we have
;
For
we have
. We need to prove that
Actually, we only need to prove that
(1)
where
and
for the k-index obtained by deleting the last component
of
. In fact, applying G-Itô formula and independence of Brown motion, one has
(2)
Taking integral on Equation (2) and combined with Equation (1), the proof is completed. This theorem greatly simplifies the calculation process and provides some convenience for the subsequent related research.
Example. For
, and
are different from each other. Using G-Itô formula and the above theorem 1, we can get
There is a recursive relationship for multiple G-Itô integrals, which we shall now derive.
Theorem 2. Given on a sublinear expectation space
,
. We have
for
, where
for
.
Proof. We prove it by mathematical induction. For
, we have
;
For
, according to G-Itô formula above, we can get
;
For
, we have
, for
. We need to prove that
According to mathematical induction and G-Itô formula, the proof is completed.
The above theorems can help us to get the iterative formula of the jump process equation and provide beneficial help for the subsequent related research.
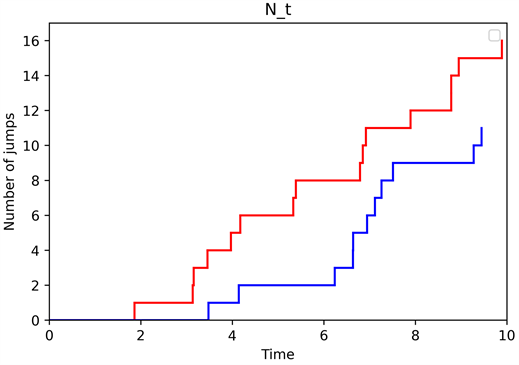
Numerical Simulation. The relevant numerical simulation is given below. In the G-expectation space, we consider the simulation of the G-Poisson process. It can be seen from the following figure that the G-Poisson process shows a phased rise, in which the red line segment is
and the blue line segment is
.