Gradient Observability for Semilinear Hyperbolic Systems: Sectorial Approach ()
1. Introduction
The regional observability is one of the most important notions of system theory, and it consists in reconstructing the initials conditions (initial state and initial speed) for hyperbolic systems only in a subregion  of the system evolution domain
of the system evolution domain . This concept was largely developed (see [1] [2] ) for parabolic systems and for hyperbolic systems (see [3] [4] ). Subsequently, the concept of regional observability was extended to the gradient observability for parabolic systems (see [5] [6] ) and for hyperbolic systems (sees [7] ), which consist in reconstructing directly the gradient of the initial conditions only in a critical subregion interior
. This concept was largely developed (see [1] [2] ) for parabolic systems and for hyperbolic systems (see [3] [4] ). Subsequently, the concept of regional observability was extended to the gradient observability for parabolic systems (see [5] [6] ) and for hyperbolic systems (sees [7] ), which consist in reconstructing directly the gradient of the initial conditions only in a critical subregion interior  without the knowledge of the initial conditions. This concept finds its application in many real world problems.
without the knowledge of the initial conditions. This concept finds its application in many real world problems.
The aim of this paper is to study the regional gradient observability of an important class of semilinear hyperbolic systems. We will focus our attention on the case where the dynamic of the system is a linear operator and sectorial. This approach was examined for semilinear parabolic systems to reconstruct the initial gradient state ( [8] ) and for semilinear hyperbolic systems to reconstruct the initial state and the initial speed. For observability problem when one is confronted to the question of reconstructing the gradient state and the gradient speed, it is important to take into account the effects of non-linearity. For example, approximate controllability of semilinear system can be obtained when the non-linearity satisfies some conditions (see [9] [10] ), and the used techniques combine a variational approach to controllability problem for linear equation and fixed point method. The techniques are also based on linear infinite dimensional observability theory together with a variety of fixed point theorems.
The plan of the paper is as follows: Section 2 is devoted to the presentation of the problem of regional gradient observability of the considered system. Section 3 concerns the sectorial approach. Numerical approach is developed in the last section.
2. Problem Statement
Let  be an open bounded subset of
be an open bounded subset of .
.
For , we denote
, we denote ,
,  and we consider the following semilinear hyperbolic system
and we consider the following semilinear hyperbolic system
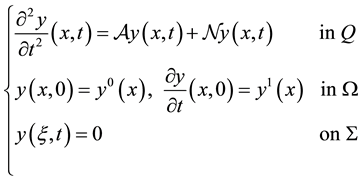 (1)
(1)
where  is a second order elliptic linear operator, symmetric generating a strongly continuous semigroup
is a second order elliptic linear operator, symmetric generating a strongly continuous semigroup
 and
and  is a nonlinear operator assumed to be locally Lipshitzian.
is a nonlinear operator assumed to be locally Lipshitzian.
Let  denotes the solution of system (1) (see [11] ) and the function of measurements is given by the output function
denotes the solution of system (1) (see [11] ) and the function of measurements is given by the output function
 (2)
(2)
where ![]() is a linear operator from
is a linear operator from ![]() to the space
to the space![]() , and depends on the number and the nature of the considered sensors.
, and depends on the number and the nature of the considered sensors.
Let ![]() a basis of eigenfunctions of the operator
a basis of eigenfunctions of the operator![]() , with Dirichlet conditions and the associated eigenvalues
, with Dirichlet conditions and the associated eigenvalues ![]() of multiplicity
of multiplicity![]() .
.
For any ![]() the semigroup
the semigroup ![]() is given by
is given by
![]()
Without loss of generality we note: ![]() and we associate to the system (1) the linear system
and we associate to the system (1) the linear system
![]() (3)
(3)
The system (3) admits a unique solution ![]() (see [12] ).
(see [12] ).
Let denote![]() ,
, ![]() for all
for all![]() ,
, ![]() and
and![]() .
.
The system (1) may be written as
![]() (4)
(4)
and the system (3) is equivalent to
![]() (5)
(5)
Systems (4) and (5) are augmented with the output function
![]() with (6)
with (6)
The system (1) can be interpreted in the mild sense as follows
![]() (7)
(7)
and the output equation can be expressed by
![]()
Let ![]() be the observation operator defined by
be the observation operator defined by
![]()
which is linear and bounded with the adjoint![]() .
.
Consider the operator ![]() given by
given by
![]()
where
![]()
![]() is the adjoint of
is the adjoint of![]() .
.
The initial condition ![]() and
and ![]() its gradient are assumed to be unknown.
its gradient are assumed to be unknown.
For ![]() an open subregion of
an open subregion of ![]() and of positive Lebesgue measure, let
and of positive Lebesgue measure, let ![]() be the restriction operator defined by
be the restriction operator defined by
![]()
where
![]()
![]() . (resp.
. (resp.![]() ) is the adjoint of
) is the adjoint of ![]() (resp.
(resp.![]() ), and we consider the operator
), and we consider the operator
![]()
Let ![]() be the gradient of the initial condition
be the gradient of the initial condition![]() , we have
, we have
![]() (8)
(8)
where![]() ,
, ![]() and
and
![]()
Definition 1.
The System (3)-(2) is said to be exactly (respectively. weakly) ![]() -observable in
-observable in ![]() if
if ![]()
(respectively. ![]()
Definition 2.
The semilinear system (1) augmented with output (2) is said to be gradient observable in ![]() (
(![]() -observable in
-observable in![]() ) if we can reconstruct the gradient of its state and the gradient of its speed in a subregion
) if we can reconstruct the gradient of its state and the gradient of its speed in a subregion ![]() of
of ![]() at any time
at any time![]() .
.
The study of regional gradient observability leads to solving the following problem:
Problem 1.
Given the semilinear system (1) and output (2) on![]() , is it possible to reconstruct
, is it possible to reconstruct ![]() which is the gradient of initial state and the gradient of initial speed of (1) in
which is the gradient of initial state and the gradient of initial speed of (1) in![]() ?
?
Let’s consider ![]() and we define, for
and we define, for![]() , the operator
, the operator ![]() by
by
![]()
then we have the following results:
Proposition 1.
If the system (3) is weakly ![]() -observable, then the solution
-observable, then the solution ![]() of the system (6) is a fixed point of the mapping
of the system (6) is a fixed point of the mapping ![]() defined by:
defined by:
![]()
where ![]() is the pseudo inverse of the operator
is the pseudo inverse of the operator ![]() and
and ![]() such that
such that
![]()
where ![]() is the residual part.
is the residual part.
Proof
The solution of the system (4) can be expressed by ![]() thus,
thus, ![]() so we have
so we have
![]()
where ![]() is the output function which allows information about the considered system.
is the output function which allows information about the considered system.
Using the second decomposition of initial condition we obtain ![]() which is equivalent to
which is equivalent to![]() .
.
If the linear part of the system (1) is weakly ![]() -observable in
-observable in![]() , then we have
, then we have
![]()
where ![]() is the pseudo inverse of the operator
is the pseudo inverse of the operator![]() .
.
Finally, solution of problem of ![]() -observability in
-observability in ![]() is a fixed point of the following function:
is a fixed point of the following function: ![]() define by:
define by:
![]() (9)
(9)
Proposition 2.
If ![]() is closed in
is closed in ![]() and if the function (9) has a unique fixed point
and if the function (9) has a unique fixed point ![]() such that
such that
![]() (10)
(10)
then ![]() is the initial gradient to be observed in
is the initial gradient to be observed in ![]() of system (4).
of system (4).
Proof
Let ![]() a fixed point of equation (9), then
a fixed point of equation (9), then
![]()
But the operator ![]() is the orthogonal projection of
is the orthogonal projection of ![]() in
in ![]() and
and ![]() satisfy
satisfy
condition (10), then![]() .
.
Finally ![]()
which is the initial gradient to be observed in ![]() of system (4).
of system (4).
3. Sectorial Approach
In this section, we study Problem 1 under some supplementary hypothesis on ![]() and the nonlinear operator
and the nonlinear operator![]() .
.
With the same notations as in the previous case, we reconsider the semilinear system described by the equations (4) and (6) where one supposed that the operator ![]() generates an analytic semigroup
generates an analytic semigroup ![]() in the state space
in the state space![]() .
.
Let’s consider ![]() such that
such that ![]() with
with ![]() is a positive real number and
is a positive real number and ![]()
denotes the real part of spectrum of![]() . Then for
. Then for![]() , we define the fractional power
, we define the fractional power ![]() as a closed operator with domain
as a closed operator with domain ![]() which is a dense Banach space on
which is a dense Banach space on ![]() endowed with the graph norm
endowed with the graph norm
![]()
and consider![]() .
.
We consider Problem 1 in ![]() endowed with the norm
endowed with the norm
![]() (11)
(11)
We have
![]()
where ![]() is a constant. For more details, see ( [2] [6] [13] )
is a constant. For more details, see ( [2] [6] [13] )
For![]() , assume that
, assume that
![]() (12)
(12)
And the operator ![]() is well defined and satisfies the following conditions:
is well defined and satisfies the following conditions:
![]() (13)
(13)
Those hypothesis are verified by much important class of semi linear hyperbolic systems. For example the equation governing the flow of neutrons in a nuclear reactor
![]()
which![]() .
.
The operators ![]() and
and ![]() corresponding are
corresponding are
![]() ;
;
The assumption is satisfied with ![]() and
and![]() .
.
Various examples are given and discussed in ( [13] [14] ).
We show that exists a set of admissible initial gradient state and admissible initial gradient speed, admissible in the sense that system (3) be weakly ![]() -observable.
-observable.
Let’s consider ![]() given by
given by
![]()
where ![]() is the restriction in
is the restriction in ![]() and
and ![]() is the residual part in
is the residual part in ![]() of the initial gradient condition
of the initial gradient condition![]() .
.
We assume that
![]() (14)
(14)
then we have the following result.
Proposition 3.
Suppose that system (3) is weakly ![]() -observable in
-observable in![]() , and (12), (13) and (14) satisfied, then the following assertion hold:
, and (12), (13) and (14) satisfied, then the following assertion hold:
・ There exist ![]() and
and ![]() such that for all
such that for all ![]() the function
the function ![]() has a unique fixed point
has a unique fixed point ![]() in the ball
in the ball ![]() solution of the system (4).
solution of the system (4).
・ There exist ![]() and
and ![]() such that
such that ![]() the mapping f is lipschitzian where
the mapping f is lipschitzian where
![]()
Proof
・ Since![]() , then there exists
, then there exists ![]() such that
such that ![]() and we have
and we have![]() .
.
Let us consider ![]() and
and ![]() in
in ![]() and
and ![]() we have
we have
![]()
where
![]()
Using Holder’s inequality we take ![]() and using (13), we have
and using (13), we have
![]()
On the other hand, we have
![]()
but we have
![]()
and
![]()
and using Holder’s inequality we obtain
![]()
then we have
![]()
and
![]()
or
![]()
where ![]()
Finally
![]()
Let’s consider ![]() and
and ![]()
![]() , then
, then![]() .
.
It is sufficient to take ![]() and
and![]() , then for all
, then for all ![]() we have
we have ![]()
Let ![]() and
and ![]() be the solution of system (4) corresponding respectively to the initial gradient in
be the solution of system (4) corresponding respectively to the initial gradient in![]() , we suppose that we have the same residual part
, we suppose that we have the same residual part![]() , then for
, then for ![]() we have
we have
![]()
but we have
![]()
and we deduce that
![]() (15)
(15)
Finally ![]() is lipschitzian in
is lipschitzian in![]() .
.
Remark 1.
The given results show that there exists a set of admissible gradient initial state. If the gradient initial state is taken in![]() , with a bounded residual part then the system (4) has only one solution in
, with a bounded residual part then the system (4) has only one solution in![]() .
.
Here we show that if measurements are in![]() , with
, with ![]() is suitably chosen then the gradient initial state can be obtained as a solution of a fixed point problem.
is suitably chosen then the gradient initial state can be obtained as a solution of a fixed point problem.
Let us consider the mapping
![]() (16)
(16)
and assume that![]() .
.
Then we have the following result.
Proposition 4.
Assume that
![]() (17)
(17)
![]() (18)
(18)
and if the linear system(3)is weakly ![]() -observable in
-observable in ![]() and (13) holds, then there exists
and (13) holds, then there exists ![]() and
and![]() , such that for all
, such that for all![]() , the function (16) admit a unique fixed point in
, the function (16) admit a unique fixed point in ![]() which corresponds to the gradient initial condition
which corresponds to the gradient initial condition ![]() observed in
observed in![]() . Furthermore, the function
. Furthermore, the function
![]()
is lipschitzian.
Proof
Let us consider ![]() and
and ![]() in
in![]() , using (11), (13), (15) and (17) we have
, using (11), (13), (15) and (17) we have
![]()
or![]() , then there exists
, then there exists ![]() such that
such that ![]() and we have
and we have![]() . Then we obtain
. Then we obtain![]() .
.
On the other hand, using the inequality (13), (17) and (18), we have
![]()
Let’s consider ![]()
In order to have![]() , it suffices to consider
, it suffices to consider![]() .
.
For![]() , we have
, we have
![]()
which gives
![]()
then
![]()
which shows that ![]() is Lipschitzian.
is Lipschitzian.
4. Numerical Approach
4.1. Numerical Approach
We show the existence of a sequence of the initial gradient state and initial gradient speed which converges respectively to the regional initial gradient states and initial gradient speed to be observed in![]() .
.
Proposition 5.
We suppose that the hypothesis of Proposition 4 are verified, then for![]() , the sequence of the initial gradient condition defined in
, the sequence of the initial gradient condition defined in ![]() by
by
![]()
converges to ![]() the regional initial gradient condition (the regional initial gradient state
the regional initial gradient condition (the regional initial gradient state ![]() and the regional initial gradient speed
and the regional initial gradient speed![]() ) to be observed in
) to be observed in![]() , where
, where ![]() is the residual part of the initial gradient condition in
is the residual part of the initial gradient condition in![]() .
.
Proof
We have,
![]()
or![]() , then there exists
, then there exists ![]()
![]() ,
, ![]()
![]()
Then ![]() is a Cauchy sequence on
is a Cauchy sequence on ![]() and its convergence.
and its convergence.
We consider ![]() and
and ![]() with
with
![]()
We have![]() , then
, then
![]()
then
![]()
which shows that the sequence ![]() converges to
converges to ![]() in
in![]() .
.
On the other hand, we have
![]()
Then ![]() converges to the regional initial gradient
converges to the regional initial gradient ![]() to be observed in
to be observed in![]() .
.
4.2. Algorithm
Now let’s consider the sequence![]() , then we have
, then we have
![]() and
and
Thus we obtain the following algorithm:
Algorithm:
1. Given the initial condition![]() , the region
, the region![]() , The domain
, The domain ![]() and the function of distribution
and the function of distribution ![]() and the accuracy threshold
and the accuracy threshold![]() ,
,![]() .
.
2. Repeat
a) ![]()
b) ![]()
c) ![]()
Until ![]()
3. ![]() which corresponds to the initial gradient condition to observed
which corresponds to the initial gradient condition to observed ![]() in
in![]() .
.
Else ![]() and go to step 2.
and go to step 2.
5. Conclusion
The question of the regional gradient observability for semilinear hyperbolic systems was discussed and solved using sectorial approach, which uses sectorial properties of dynamical operators, the fixed point techniques and the properties of the linear part of the considered system. The obtained results are related to the considered subregion and the sensor location. Many questions remain open, such as the case of the regional boundary gradient observability of semilinear systems using Hilbert Uniqueness Method (HUM) and using the sectorial approach. These questions are still under consideration and the results will appear in a separate paper.