Two New Integrable Hierarchies and Their Nonlinear Integrable Couplings ()
1. Introduction
Integrable equations are a significant research topic of classical integrable systems. Thereinto, integrable coupling, as an extension of the integrable equation, was formulated and initialized with the clarity of the inner relationship between Virasoro algebras and hereditary operators [1] [2] . A few methods were presented by using perturbations [1] [2] , enlarging spectral problems [3] [4] [5] , creating higher-dimensional loop algebras [6] [7] , constructing a new algebraic system [8] [9] [10] , and making use of semi-direct sums of specific Lie algebras, for instance, the orthogonal Lie algebra
, to construct some soliton hierarchies and their integrable couplings [11] - [16] . Much richer mathematical structures behind integrable couplings were explored, such as Lax pairs with several spectral parameters [17] [18] [19] , integrable constrained flows with higher multiplicity [20] [21] , local bi-Hamiltonian structures in higher dimensions and hereditary recursion operators of higher order [22] [23] . A lot of complex physical phenomena can be explained by all kinds of coupling systems [24] . Therefore, integrable couplings have attracted more and more attention from researchers in engineering and mathematical theory.
Thereinto, the nonlinear integrable couplings are a charming subject, which can be achieved by using an extended Lie algebra. First, an isospectral problem
(1)
and its auxiliary condition
(2)
admit a zero curvature equation
(3)
i.e., a Lax integrable system
(4)
where
,
is the corresponding loop algebra of a Lie algebra A. Next, take enlarged spectral matrices
(5)
in which
and
derive from (1) and (2), respectively, where
,
and
consist of u and v. Then an enlarged zero curvature equation
(6)
i.e.,
(7)
is a nonlinear integrable coupling of (3), because the commutator
can generate nonlinear terms.
In this paper, a new four-dimensional Lie algebra H is firstly presented, and another one G is obtained through an invertible linear transformation. A generalized NLS-MKdV hierarchy and a new integrable soliton hierarchy are achieved by using the Loop algebras
and
of H and G in Section 2. Two special non-semisimple Lie algebras
and
are determined programmatically, and its associated nonlinear continuous integrable couplings and their bi-Hamiltonian structures are established in Section 3. Finally, concluding remarks are given, as well as some proposals for the future work.
2. Two New Hamiltonian Hierarchies
2.1. Two Lie Algebras
A Lie algebra
is presented
(8)
with
(9)
An invertible linear transformation can be established as follows:
(10)
Specially, taking
(11)
results in a new Lie algebra
, where
(12)
equipped with
(13)
In what follows, the corresponding loop algebras
and
of the Lie algebras H and G are introduced, respectively. Let
,
, where a loop algebra
is defined by
and
is homoplastically defined by
,
represents a set of Laurent polynomials in
. Taking
, the commutator relations of
are
(14)
Similarly, the commutator relations of the loop algebra
have
(15)
Note that the commutator operations in loop algebras
and
are closed. In the following section, one endeavor to deduce two soliton hierarchies by using the two Lie algebras.
2.2. Two New Integrable Hierarchies
2.2.1. Generalized NLS-MKdV Hierarchy
Let
,
is reduced to the simplest loop algebra
where
. Considering the spectral matrix
(16)
and setting
(17)
the stationary zero curvature equation
(18)
admits the recurrence relations for W as follows:
(19)
Note that
Then (18) can be reset below:
(20)
A direct calculation has
. Taking
, the zero curvature equation
(21)
leads to the following integrable hierarchy
(22)
that is
(23)
where
(24)
Taking
and the modified term
, the system (23) reduces to the NLS-MKTV hierarchy [25] . Therefore, (23) is named a generalized NLS-MKdV hierarchy.
2.2.2. A New Integrable Hierarchy
Letting
of
results in a loop algebra
,
,
. Considering the following spectral
(25)
and setting
(26)
the stationary zero curvature
admits the recurrence relations
(27)
Note that
, and taking
, the zero curvature equation
leads to the integrable hierarchy
(28)
where
(29)
2.3. Bi-Hamiltonian Structures of (23) and (28)
In this section, the bi-Hamiltonian structures of soliton hierarchies (23) and (28) are established. Firstly, the bi-Hamiltonian structure of (23) is obtained by applying the trace identity.
Letting
(30)
the bilinear forms
,
,
,
can be obtained by the calculation of
(A and B are square matrices). Substituting these results into the trace identity
results in
(31)
Comparing of the coefficients of
these both sides of the above equations, one has
(32)
To fix the
, taking
into (32) results in
. Therefore, the bi-Hamiltonian structure of (23) can be obtained below:
(33)
It is easy to prove
. Therefore, the hierarchy (33) is integrable in the Liouville sense.
Next, the bi-Hamiltonian structure of (28) is derived by using the trace identity. Letting
(34)
the bilinear forms
,
,
,
are computed, and
can be obtained similarly.
Comparing the coefficients of
in the both side of the above equation yields
(35)
To fix the
, substituting
into (35) results in
. Therefore, the bi-Hamiltonian structure of (28) can be established as follows:
(36)
It is easy to prove
. Therefore, the hierarchy (36) is integrable in the Liouville sense.
3. Nonlinear Integrable Couplings of Soliton Hierarchies
3.1. Extension of Lie Algebras
Letting
, it is an extension of the Lie algebra H, where
(37)
Taking
,
yields
(38)
which is a critical factor for generating nonlinear integrable couplings of integrable hierarchies. In order to seek a nonlinear integrable coupling of (23), a loop algebra of the Lie algebra
reads
Similarly, letting
, where
(39)
Taking
,
results in
(40)
And
is the corresponding loop algebra of
, which is enslaved to derive a integrable coupling of (28).
3.2. Nonlinear Continuous Integrable Couplings
3.2.1. Nonlinear Integrable Coupling of the Generalized NLS-MKdV Hierarchy
An enlarged spectral matrix associated with the loop algebra
is introduced as follows:
(41)
i.e.
, where U is defined by (16). Assume that
the stationary zero curvation
admits the recurrence relations
(42)
Choosing the initial values as
,
,
, and presuming
(42) uniquely yields all differential polynomial functions
and
. The first few sets are
(43)
Note that
(44)
A direct calculation reads
Taking
, the zero curvature equation
(45)
leads to the following integrable hierarchy
(46)
If
, the system (46) is reduced to (23). According to the concept of nonlinear integrable couplings [26] [27] [28] , (46) is a nonlinear integrable coupling of (23).
3.2.2. Nonlinear Integrable Coupling of the Hierarchy (28)
An enlarged spectral matrix associated with the loop algebra
is given below:
(47)
that is,
where
is defined by (25). Assume that
the stationary zero curvature equation
admits the recurrence relations
(48)
Choosing the initial data as
,
,
, and presuming
, the above-mentioned recursion relation uniquely engenders all differential polynomial functions
and
. The first few sets are listed as follows:
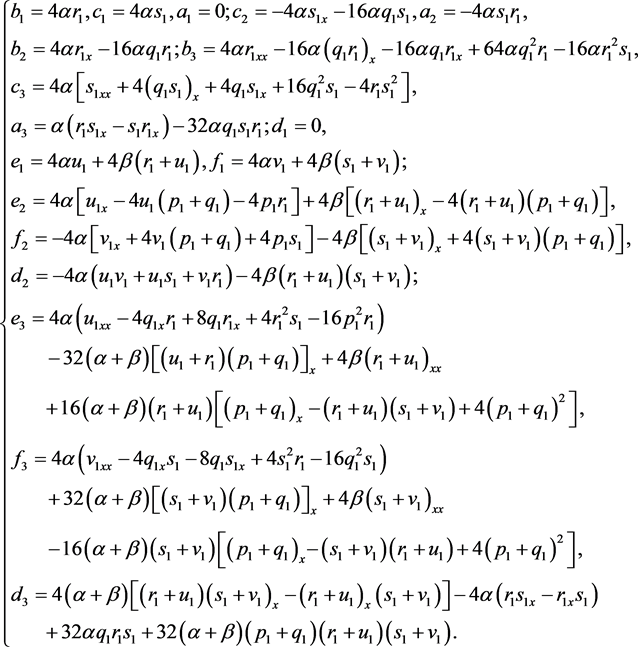 (49)
(49)
Note that
(50)
A direct calculation reads
Taking
, the zero curvature equation
(51)
leads to the following integrable hierarchy
(52)
If
, (52) is reduced to (28), and (52) is a nonlinear integrable coupling of (28).
3.3. Bi-Hamiltonian Structures of Nonlinear Integrable Couplings
3.3.1. Bilinear Forms
In this section, the bi-Hamiltonian structures of the nonlinear integrable couplings of the generalized NLS-MKdV hierarchy (23) and the new integrable hierarchy (28) can be established. In order to achieve this target, two non-degenerate, symmetric and ad-invariant bilinear forms on two Lie algebras
and
are introduced. First of all, an isomorphic mapping
between the Lie algebra
and a vector space R8 is established that
(53)
which imports a Lie algebraic system on R8. The corresponding commutator
on R8 is given by
(54)
where
,
,
(55)
is a square matrix and
,
. The bilinear form
on R8 is determined. Simultaneously,
and
(56)
are ascertained in accordance with the symmetric property
, and the ad-invariance property
, where
is an
constant matrix. Solving the matrix Equation (56) yields
(57)
where
and
are arbitrary constants, and
. Thus, a bilinear form is defined on the Lie algebra
by
(58)
Similarly, an isomorphic mapping
is established between the Lie algebra
and a vector space R8:
(59)
The corresponding commutator
on R8 is given by
(60)
where
,
and
is a square matrix
(61)
and
. According to
, solving the matrix equation
results in
(62)
where
and
are arbitrary constants, and
. Therefore, a bilinear form
(63)
is defined on the Lie algebra
, where
.
Obviously, the bilinear forms (58) and (63) are non-degenerate, symmetric and ad-invariant associated with the Lie product.
3.3.2. Bi-Hamiltonian Structures of the Integrable Hierarchies (46) and (52)
Let
(64)
where
, V is defined by (30). The bilinear forms
can be calculated according to (58), as follows:
(65)
where
is defined by (41). Substituting (65) into the Variational identity [27] , and comparing the coefficients of
yields
(66)
It is easy to see
. The adjoint symmetrical function of system (46) reads
(67)
Therefore, the bi-Hamiltonian structure of the nonlinear integrable coupling of the hierarchy (23) can be established as follows:
(68)
where
(69)
(70)
,
,
J and L are defined in (23) and (24), respectively, and
is a Hamiltonian operator.
Similarly, let
(71)
where
,
is defined by (34). Then, the bilinear forms are computed according to (63), as follows:
(72)
where
is defined by (47). Substituting (72) into the Variational identity, and comparing the coefficients of
yields
(73)
It is easy to see
, the adjoint symmetrical function of the integrable system (53) has
(74)
Therefore, the bi-Hamiltonian structure of the hierarchy (58) is obtained
(75)
where
(76)
(77)
,
and
are defined in the former system (29), and
is a Hamiltonian operator.
4. Conclusion
The generalized NLS-MKdV hierarchy and its bi-Hamiltonian structure, reduced to the NLS-MKdV hierarchy [25] , are derived from a new Lax pair. Based on the loop algebra of a new Lie algebra G, a spectral matrix is devised, and an integrable hierarchy and its bi-Hamiltonian structure are established; this is a new integrable system and not found in the related literature. Making use of extension forms of two Lie algebras, two nonlinear integrable couplings are achieved, and their Hamiltonian structures are constructed by using the Variational identity. Darboux transformations of the two integrable hierarchies can be embarked and constructed for exact solutions in the future.
Acknowledgements
This work is supported by the grants from the National Natural Science Foundations of China (Grant Nos. 61473177, 61473178 and 61573008) and the postgraduate science and technology innovation project (SDKDYC180231).